
图(一)
术语
- 图的定义
数学意义的图包含两个元素 $G=(V,E)$,顶点集合 $n = | V |$,边集合 $ e= | E | $。 假设一个图有三个顶点,彼此连通,则$V=\{v_0,v_1,v_2\}$,$E=\{(v_1,v_2),(v_1,v_3),(v_2,v_3)\}$。
- 邻接关系/关联关系
可以被边相连的两个点成为邻接关系(adjacency),邻接关系是顶点与顶点之间的关系,顶点与某条边之间的关系称为关联关系(incidence)
- 路径
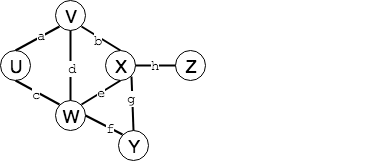
路径为一系列的顶点按照依次邻接的关系组成的序列,*$\pi = <v_0,v_1…,v_k>$,长度$|\pi|=k$。如上图中$V$到$Z$的一条路径为${b,h}$或${V,X,Z}$。路径的长度为顶点的个数或者边的个数。如果再一条通路中不含重复节点,我们称之为 简单路径 ($v_i = v_j$除非$i=j$)。
- 连通图
若图中任意两点都是连通的,那么该图称为连通图。对于有向图 $G (V,E)$,如果两个顶点 $v_i,v_j$ 间有一条从$v_i$ 到 $v_j$ 的有向路径,责成同时还有一条从 $v_j$ 到 $v_i$ 的有向路径,则称两个顶点强连通,称$G 为强连通图。强连通图只有一个连通分量,即其自身。
- 环路
当路径的起点和终点重合时,称之为环路($v_0=v_k$)。如果再有向图中不包含任何环路,则称之为有向无环图(DAG,Directed Acyclic Graph),树和森林是 DAG 图的一种特例。 对于只有两个顶点的图,如果是无向图,则不认为是环路;如果是有向图,且两个顶点之间有两条边,则认为是环路,例如$<v_0,v_1>$和$<v_1,v_0>$构成环
- 无向图/有向图
若邻接顶点$u$和$v$的次序无所谓,则$(u,v)$为无向边(undirected edge),若图中的所有边均为无向边,则这个图称为无向图。反之,有向图(digraph)中均为有向边(directed edge),$u,v$分别称作边$(u,v)$的尾,头,表示从$u$出发,到达$v$。
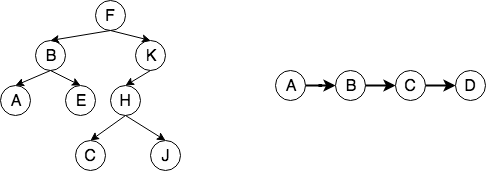
之前介绍的数据结构都可以看成是图的一种表现形式,比如二叉树是一种无权的有向无环图,节点的入度为 1,出度最大为 2,顶点之间只有一条路径。而单项链表也可以看成是一种无权的 DAG,每个节点的入度出度都为 1
图的表示
上面我们已经了解了关于图的逻辑模型和基本接口,但是在计算机中该如何表示这个模型呢?方法有很多种,这里我们主要介绍三种,分别是边表(edge list),邻接矩阵(adjacency matrix)和邻接表(adjacency list)。
边表
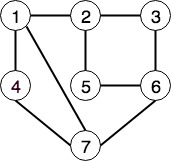
边表,顾名思义是使用一个无序链表来表示图,其中链表中的每个节点为一组边的集合。如上图中,我们可以使用如下链表来表示图:
| (1,2) | (1,4) | (1,7) | (2,3) | (2,5) | (3,6) | (4,7) | (5,6) | (5,7) | (6,7) |
对于每个节点的有序对,使用起点和终点来表示方向,值为顶点的内容。因此这种表示方法不会显示的存放顶点,所有顶点信息均包含在边表中。
edge_list = [ [1,2],[1,4],[1,7],...,[6,7]]
显然这种方式对顶点操作不是很友好,如果想要找出4的邻居节点,则要遍历每个节点,不是很高效。
邻接矩阵/关联矩阵
所谓邻接矩阵就是描述顶点之间链接关系的矩阵。设$G=<V,E>$是一个有$n$个顶点图,则邻接矩阵是一个$n \times n$的方阵,用二维数组A[n,n]表示,它的定义如下:
如果顶点$i,j$相连,对于无向图,则$A[i,j]$和$A[j,i]$的值相同;对于有向图,则分别对应各自的$A[i,j]$和$A[j,i]$的值;如果是带权图,则矩阵中元素的值为权值$w$。
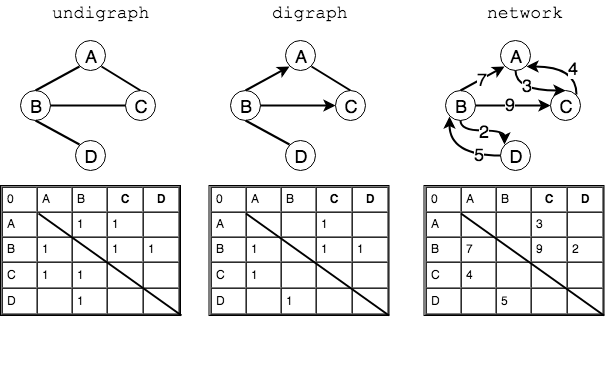
可见,对于一个$n$个顶点的图,邻接矩阵是一个对称阵(默认不考虑自环的情况,因此对角线的元素值为 0),空间代价为$O(n^2)$。
基于邻接矩阵的图结构,可以用二维数组来表达:
class Graph{
private:
vector<Vertex* > V; //顶点
vector<vector<Edge<Te>*>> matrix; //边集合,邻接矩阵
//map<Vertex* , vector<Edge* >> matrix; //也可以使用map
//map<Vertex* , set<Edge* >> matrix; //也可以使用map
};
使用邻接矩阵的优点是:
- 直观,易于理解和实现
- 适用范围广,包括有向图,无向图,带权图,自环图等等,尤其适用于稠密图
- 判断两点之间是否存在联边: $O(1)$
- 获取顶点的出度入度: $O(1)$
- 添加删除边后更新度: $O(1)$
- 扩展性强
缺点为:
- 空间复杂度为$\Theta(n^2)$,与边数无关
以左边无向图的邻接矩阵为例,Python 表示如下:
adjacency_matrix = [
#v0,v1, v2, v3
[0, 1, 1, 0], #v0
[1, 0, 1, 1], #v1
[1, 1, 0, 0], #v2
[0, 1, 0, 0] #v3
]
邻接表
对于任何一个矩阵,我们以定义它的稀疏因子:在$m \times n$的矩阵中,有$t$个非零单元,则稀疏因子$\delta$为
\[\delta = \frac{t}{m \times n}\]若$\delta < 0.05$,可认为是稀疏矩阵。对于稀疏图,边较少,邻接矩阵会出现大量的零元素,耗费大量的存储空间和时间,因此可以采用邻接表存储法。
邻接表(adjacency list)采用的是链式存储结构,它为顶点和边各自定义了一个结构,对于顶点包含两部分:
- 存放该节点$v_i$的数据域
- 指向第一条边对象的指针
对于边结构包含三部分:
- 与顶点$v_i$临街的另一顶点的序号
- 顶点$v_i$下一条边的指针
- 权重值(可选)
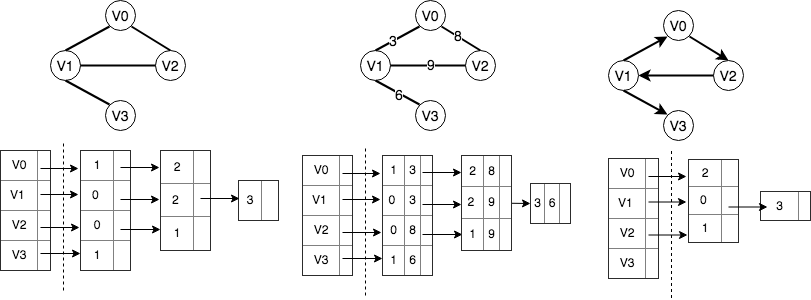
上图分别为无向图,带权图和有向图的邻接表,对于有向图,有出度和入度两种邻接表,这里只给出了出度的邻接表,对于入度的情况类似。由上图的结构可以看出使用邻接表,对每个节点的相邻节点的访问是非常高效的,另外,邻接表的空间利用率也相对较高。以左边无向图的邻接表为例,Python 表示如下:
#使用list
adjacency_list = [
[1,2], #v0
[0,2,3], #v1
[0,1], #v2
[1,1] #v3
]
#也可以使用kev,value对表示
adjacency_map = {
0: [1,2],
1: [0,2,3],
2: [0,1],
3: [1,1]
}
基于邻接表的无向图的 C++代码表示如下:
class Graph {
int n; //顶点个数
vector<vector<int>> adj; //邻接表
public:
Graph(int n){
this.n = n;
adj = vector<<vector<int>>(n,vector<int>());
}
void addEdge(int s, int t){
//无向图一条边存两次
adj[s].push_back(t);
adj[t].push_back(s);
}
}
几种图的不同实现方式的性能比较
| 边表 | 邻接表 | 邻接矩阵 | |
| 内存消耗 | $V+E$ | $V+E$ | $V^2$ |
| 判断相邻节点 | $E$ | $degree(v)$ | V |
| 添加顶点 | $1$ | $1$ | $V^2$ |
| 删除顶点 | $E$ | $1$ | $V^2$ |
| 添加边 | $1$ | $1$ | $1$ |
| 删除边 | $E$ | $degree(v)$ | 1 |
图的搜索与遍历
在图中搜索两点间的路径有很多种方式,常用的有 DFS,BFS,Dijkstra,A*等,对于图的遍历,和树类似我们也可以使用 DFS 和 BFS 两种方式,但是图有两个树没有的问题:
- 连通的问题,从一个点出发不一定能够到达所有点,比如非连通图
- 可能存在回路,因此遍历可能进入死循环
解决这两个问题,需要给顶点加一个状态位,标识该节点是否已经被访问过。另外,对图的遍历,可将其按照一定规则转化为对树的遍历
void graph_traverse(){
// 对图所有顶点的标志位进行初始化
for(int i=0; i<VerticesNum(); i++)
status(V[i]) = UNVISITED;
// do_traverse函数用深度优先或者广度优先
do_traverse(v);
}
}
DFS
图的 DFS 遍历过程和之前介绍的树的 DFS 遍历过程类似,都是从一个节点开始,不断的递归+回溯,最终走完全部路径。其基本步骤为
- 选取一个未访问的点$v_0$作为源点,访问顶点$v_0$
- 若$v_0$有未被访问的邻居,任选其中一个顶点$u_0$,进行递归地深搜遍历;否则,返回
- 顶点$u_0$,重复上述过程
- 不断递归+回溯,直至所有节点都被访问
//dfs遍历伪码
void dfs(Vertex v) { // 深度优先搜索的递归实现
status(v) = VISITED; // 把标记位设置为 VISITED
Visit(v); // 访问顶点v
//访问所有UNVISITED状态的节点
for(auto u : getNbrs(v))
if (status(u) == UNVISITED){
dfs(u);
}
}
}
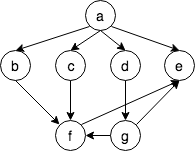
例如上图 DFS 的遍历次序为:a b c f d e g。这里有一点要注意,由于第二步对相邻节的未访问的节点选取规则不唯一(下图例子使用的是字母顺序),因此对全图进行遍历得到结果序列是不唯一的。类似的,如果使用 DFS 进行搜索,寻找两点间路径,得到的结果不一定是最短路径。dfs 的搜索代码如下
void dfs(int s, int t){
bool found = false;
//记录访问过的顶点
vector<bool> visited(n,false);
//记录前驱节点,创建n个桶
vector<int> prev(n,-1);
//调用一个辅助函数
helper(s,t,visited,prev,found);
if(found){
print_path(prev,st,);
}
}
void helper(int s, int t, vector<bool>& visisted, vector<int>& prev, bool& found){
if(found == true){
return ;
}
visited[s] = true;
if(s == t){
found = true;
return;
}
for(int i=0;i<adj[s].size();i++){
int x = adj[s][i];
if(!visited[x]){
//记录前驱节点
prev[x] = s;
helper(x,t,visited,prev,found);
}
}
}
//打印路径
void print_path(vector<int>& prev, int s, int t){
if(!prev[t] != -1 && t != s){
print_path(prev,s,prev[t]);
}
cout<<t<<" ";
}
BFS
图的广度优先遍历过程类似从某个点出发,一圈一圈的向外层顶点扩散的过程
- 从图中的某个顶点$v_0$出发,访问并标记该节点
- 依次访问$v_0$所有尚未访问的邻接顶点
- 依次访问这些邻接顶点的邻接顶点,如此反复
- 直到所有点都被访问过
//bfs遍历伪码
void BFS(Vertex v) {
status(v) = VISITED;
queue<Vertex> Q; // 使用STL中的队列
Q.push(v); // 标记,并入队列
while (!Q.empty()) { // 如果队列非空
Vertex v = Q.front (); // 获得队列顶部元素
Q.pop(); // 队列顶部元素出队
Visit(u);//访问节点
//遍历v的每一个未被访问的相邻节点
for(auto u : getNbrs(v)){
if (status(u) == UNVISITED){
status(u) = VISITED;
u.previous = v;//设置前驱节点
Q.push(u);
}
}
}
}
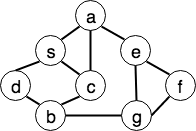
以上图为例,假设我们从s开始遍历:
- 随机选取一个
s节点,入队 s出队并做标记,将s的相邻节点a,c,d,入队a出队并做标记,将a相邻节点入队,由于s,c已经是被标记,于是只有e入队- 同理,
c出队,b入队,以此类推 - 直至节点全部被访问
对于无权图来说,BFS 相比 DFS 可以用来寻找两点间(例如上图中的 a 和 b)的最短路径(最少边),但却不容易保存到达 b 点的路径,解决这个问题,可以给每个节点加一个指向前驱节点的指针,或者使用一个数组存储中间节点,代码如下:
//起点s,终点t,顶点个数n
void bfs_search(int s, int t){
if(s == t){
return;
}
//记录访问过的顶点
array<bool,n> visited = {false};
visited[s] = true;
queue<int> q;
q.push(s);
//记录前驱节点,创建n个桶
vector<int> prev(n,-1);
while(!q.empty()){
int x = q.front();
q.pop();
visited[x] = true;
//访问x的邻接顶点
for(int i=0;i<adj[x].size();i++){
int y = adj[w][i];
if(!visited[y]){
//记录y的前驱为x
prev[y] = x;
//找到目标节点
if(t == y){
print_path(prev,s,t);
return;
}
q.push(y);
}
}
}
}
下面我们来分析一下时间复杂度,DFS 和 BFS 每个顶点访问一次,对每一条边处理一次 (无向图的每条边从两个方向处理)
- 采用邻接表表示时,有向图总代价为 $\Theta(n + e)$,无向图为 $\Theta(n + 2e)$
- 采用相邻矩阵表示时,理论上,处理所有的边需要 $\Theta(n^2)$的时间 ,所以总代价为$\Theta(n + n^2) = \Theta(n^2)$。但实际上,在执行
nextNbr(v,u)时,可认为是常数时间,因此它的时间复杂度也可以近似为$\Theta(n + e)$
广度优先搜索和深度优先搜索是图上的两种最常用、最基本的搜索算法,比起其他高级的搜索算法,比如 A、IDA 等,要简单粗暴,没有什么优化,所以,也被叫作暴力搜索算法。所以,这两种搜索算法仅适用于状态空间不大,也就是说图不大的搜索。在下一篇文章中,我们会继续介绍几种带权图的搜索方法以及图相关的其它内容
LeetCode Problems
接下来我们来看下 Leetcode 中的一些经典 Graph 的问题
Clone Graph
这个题目的意思是给一个 Graph Node,让我们完成对这个 Graph 的 deep copy。这里 Graph 是一个有无环图,因此我们需要递归的拷贝每个 neighbor 节点,由于每个节点可能被访问多次,因此,为了避免重复拷贝,我们需要用一个 hashmap 记录已经拷贝的节点: map<oldNode: newNode>
"""
# Definition for a Node.
class Node:
def __init__(self, val = 0, neighbors = None):
self.val = val
self.neighbors = neighbors if neighbors is not None else []
"""
from typing import Optional
# the trick is to use a hashmap to store the nodes that have already been cloned
# key: old node, value: new node
class Solution:
def recursiveColone(self, node: Optional['Node'], cache) -> Optional['Node']:
if node is None:
return None
# if node is in the cache
if node in cache:
return cache[node]
newNode = Node(node.val, [])
cache[node] = newNode
for node in node.neighbors:
newNode.neighbors.append(self.recursiveColone(node, cache))
return newNode
def cloneGraph(self, node: Optional['Node']) -> Optional['Node']:
cache = {}
return self.recursiveColone(node, cache)