
图(二)
最小生成树
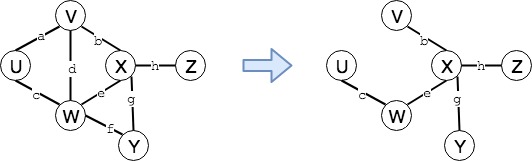
所谓生成树(Spanning Tree)是连接无环图中所有顶点的边的集合。如下图所示,我们将左边的图去环后得到了右边的无环图,该图即是一棵生成树
所谓最小生成树,是图中所有生成树中权值之和最小的一棵,简称 MST(minimum-cost spanning tree)。
- Kruskal’s algorithm
Kruskal算法是一种贪心算法,主要步骤如下:
- 将图$G$中所有边放入最小堆$E$
- 删除图$G$中的所有边,剩下$n$个顶点,此时图的状态为无边的森林$T=<V,{}>$
- 在$E$中弹出权值最小边,如果该边的两个顶点在$T$中不连通,则将其加入到$E$中,否则忽略这条边
- 依次类推,直到$E$为空,此时就得到图$G$的一颗最小生成树
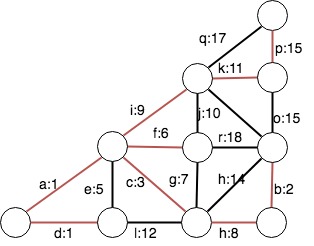
如上图所示,首先将所有边放入优先队列,则权值最小的a在堆顶,然后a出队,其两个顶点不连通,因此将该边放入图中(标红),当e出队的时候,我们发现e的两个顶点可以已通过a,d连通,因此e被忽略。按照此规则,以此类推,最终得到最小生成树(图中红色边)为:a,b,c,d,f,h,i,k,p总权值为1+2+3+4+6+8+9+11+16 = 60。不难看出,上述规则依旧是贪心法,每次选择权值最小的路径,其伪码如下:
function kruskal(graph):
//创建一个最小堆
priority_queue pq
//将图中所有边放最小堆中,则权值cost最小的边在堆顶
for edge : graph.all_edges:
pq.push(edge)
//此时产生n个顶点,对应n个等价类
while equal_num > 1: //等价类个数>1,说明还没有形成树
//循环
while not pq.empty():
e = pq.front()
pq.pop()
v1 = e.from()
v2 = e.to()
//如果v1,v2两点不连通,则把该边放入图中,否则忽略这条边
if graph.different(v1, v2): //判断v1,v2是否不连通
graph.union(v1,f2); //合并两个顶点所在的等价类
//将该条边放入图中
graph.addEdge(v1,v2)
//等价类个数-1
equal_num -= 1
Kruskal算法使用了路径压缩(并查集)来合并等价类,different() 和 Union() 函数几乎是常数。假设可能对几乎所有边都判断过了,则最坏情况下算法时间代价为$\Theta(e\log{e})$,即堆排序的时间,通常情况下只找了略多于 n 次,MST 就已经生成,因此,时间代价接近于$\Theta(e\log{e})$
- Prim’s algorithm
Prim算法和上面算法类似,也是采用贪心的策略,不同的是Prim算法每次取权值最小边对应的顶点,具体如下(代码见附录):
- 从图中任意一个顶点开始 (例如A),首先把这个顶点包括在MST中
- 然后从图中选一个与A点连通,但不再MST中的顶点B,并且A到B的权值最小的一条边连同B一起加入到MST中
- 如此进行下去,每次往 MST 里加一个顶点和一条权最小的边,直到把所有的顶点都包括进 MST 里
- 算法结束时, MST中包含了原图中的n-1条边
Prim 算法非常类似于 Dijkstra 算法,算法中的距离值不需要累积,直接用最小边,而确定代价最小的边就需要总时间$O(n^2)$;取出权最小的顶点后,修改 D 数组共需要时间$O(e)$,因此共需要花费$O(n^2)$的时间。Prim算法适合于稠密图,对于稀疏图,可以像 Dijkstra 算法那样用堆来保存距离值。
拓扑排序
所谓拓扑排序,是一种对有向无环图顶点排序的方式,排序的规则为两个顶点之间的前后位置,比如从顶点$v_i$到顶点$v_j$有一条有向边$(v_i, v_j)$,那么我们认为$v_i$在$v_j$的前面。
生活中有很多拓扑排序的场景,比如任务之间的依赖关系,学生的选课等,以选课为例,假如我们有如下课程,它们之间的依赖关系为:
| 课程代号 | 课程名称 | 先修课程 |
|---|---|---|
| C1 | 高等数学 | |
| C2 | 程序设计 | |
| C3 | 离散数学 | C1,C2 |
| C4 | 数据结构 | C2,C3 |
| C5 | 算法分析 | C2 |
| C6 | 编译技术 | C4,C5 |
| C7 | 操作系统 | C4,C9 |
| C8 | 普通物理 | C1 |
| C9 | 计算机原理 | C8 |
如下图所示,如果我们要修完图表中的课程,我们该按照怎样的顺序选课,才能保证课程能够正常修完呢(在修某一门课程前,要先修完它的先序课程)?我们可以首先按照节点间的先决条件(课程之间的关联关系)来构建一个有向无环图图,如图(a)所示,然后将图(a)等价的转化为图(b),显然,图(b)就是一份可行的选课顺序。
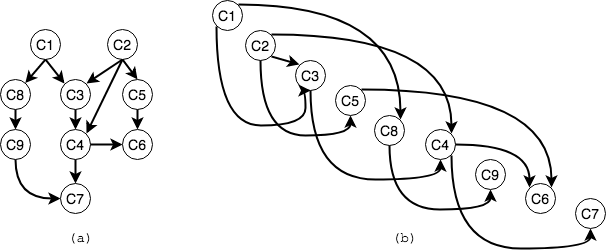
实际上,许多应用问题,都可转化和描述为这一标准形式:给定描述某一实际应用的有向图(图(b)),如何在与该图“相容”的前提下,将所有顶点排成一个线性序列(图(c))。此处的“相容”,准确的含义是:每一顶点都不会通过边,指向其在此序列中的前驱顶点。这样的一个线性序列,称作原有向图的一个拓扑排序(topological sorting)。
对于有向无环图,它的拓扑序列必然存在,但是却不一定唯一,如上面的例子,$C_1$,$C_2$互换后,仍然是一个拓扑排序。我们可以一种BFS遍历的方式来得到这样一组拓扑序列,方法如下
- 从图中选择任意一个入度为0的顶点且输出
- 从图中删掉此顶点及其所有的出边,则其所有相邻节点入度减少1
- 回到第 1 步继续执行
void TopsortbyQueue(Graph& G) {
for (int i = 0; i < G.VerticesNum(); i++)
G.status(G.V[i]) = UNVISITED; // 初始化
}
queue<Vertex<int>> Q; // 使用STL中的队列
for (i = 0; i < G.VerticesNum(); i++){ // 入度为0的顶点入队
if (G.V[i].indegree == 0) {
Q.push(i);
}
}
while (!Q.empty()) { // 如果队列非空
Vertex<int> v = Q.front();
Q.pop(); // 获得队列顶部元素, 出队
Visit(G,v);
G.status(v) = VISITED; // 将标记位设置为VISITED
for (Edge e = G.FirstEdge(v); G.IsEdge(e); e = G.NextEdge(e)) {
Vertex<int> v = G.toVertex(e);
v.indegree--; // 相邻的顶点入度减1
if (v.indegree == 0){ // 顶点入度减为0则入队
Q.push(v);
}
}
for (i = 0; i < G.VerticesNum(); i++){ // 判断图中是否有环
if (G.status(V[i]) == UNVISITED) {
cout<<“ 此图有环!”; break;
}
}
}
Resources
- A* Algorithm For Beginners
- Introduction to A*
- CS106B-Stanford-YouTube
- Algorithms-Stanford-Cousera
- 算法与数据结构-1-北大-Cousera
- 算法与数据结构-2-北大-Cousera
- 算法与数据结构-1-清华-EDX
- 算法与数据结构-2-清华-EDX
- 算法设计与分析-1-北大-Cousera
- 算法设计与分析-2-北大-EDX
附录1
- Kruskal’s algorithm
void Kruskal(Graph& G, Edge* &MST) { // MST存最小生成树的边
ParTree<int> A(G.VerticesNum()); // 等价类
MinHeap<Edge> H(G.EdgesNum()); // 最小堆
MST = new Edge[G.VerticesNum()-1]; // 为数组MST申请空间
int MSTtag = 0; // 最小生成树的边计数
for (int i = 0; i < G.VerticesNum(); i++) // 将所有边插入最小堆H中
for (Edge e = G. FirstEdge(i); G.IsEdge(e); e = G. NextEdge(e))
if (G.FromVertex(e) < G.ToVertex(e))// 防重复边
H.Insert(e);
int EquNum = G.VerticesNum(); // 开始有n个独立顶点等价类
while (EquNum > 1) { // 当等价类的个数大于1时合并等价类
if (H.isEmpty()) {
cout << "不存在最小生成树." <<endl;
delete [] MST;
MST = NULL; // 释放空间
return;
}
Edge e = H.RemoveMin(); // 取权最小的边
int from = G.FromVertex(e); // 记录该条边的信息
int to = G.ToVertex(e);
if (A.Different(from,to)) { // 边e的两个顶点不在一个等价类
A.Union(from,to); // 合并边的两个顶点所在的等价类
AddEdgetoMST(e,MST,MSTtag++); // 将边e加到MST
EquNum--; // 等价类的个数减1
}
}
}
- Prim’s algorithm
void Prim(Graph& G, int s, Edge* &MST) { // s是始点,MST存边
int MSTtag = 0; // 最小生成树的边计数
MST = new Edge[G.VerticesNum()-1]; // 为数组MST申请空间
Dist *D;
D = new Dist[G. VerticesNum()]; // 为数组D申请空间
for (int i = 0; i < G.VerticesNum(); i++) { // 初始化Mark和D数组
G.Mark[i] = UNVISITED;
D[i].index = i;
D[i].length = INFINITE;
D[i].pre = s; // D[i].pre = -1 呢?
}
D[s].length = 0;
G.Mark[s]= VISITED; // 开始顶点标记为VISITED
int v = s;
for (i = 0; i < G.VerticesNum()-1; i++) {// 因为v的加入,需要刷新与v相邻接的顶点的D值
for (Edge e = G.FirstEdge(v); G.IsEdge(e); e = G.NextEdge(e))
if (G.Mark[G.ToVertex(e)] != VISITED &&(D[G.ToVertex(e)].length > e.weight)) {
D[G.ToVertex(e)].length = e.weight;
D[G.ToVertex(e)].pre = v;
}
v = minVertex(G, D); // 在D数组中找最小值记为v
if (v == -1) return; // 非连通,有不可达顶点
G.Mark[v] = VISITED; // 标记访问过
Edge edge(D[v].pre, D[v].index, D[v].length); // 保存边
AddEdgetoMST(edge, MST, MSTtag++); // 将边加入MST
}
}
int minVertex(Graph& G, Dist* & D) {
int i, v = -1;
int MinDist = INFINITY;
for (i = 0; i < G.VerticesNum(); i++){
if ((G.Mark[i] == UNVISITED) && (D[i] < MinDist)){
v = i; // 保存当前发现的最小距离顶点
MinDist = D[i];
}
}
return v;
}