加权最短路径 | Weighted Shortest Paths
Dijkstra算法
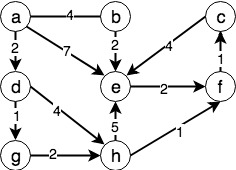
路径的权值在某些场合下是非常重要的,比如两地间飞机的票价,两个网络节点间数据传输的延迟等等。DFS和BFS在搜索两个节点路径时不会考虑边的权值问题,如果加入权值,那么两点间权值最小的路径不一定是BFS得到的最短路径,如下图中求$\{a,f\}$两点间的BFS的结果为$\{a,e,f\}$,cost为9,而cost最少的路径为$\{a,d,g,h,f\}$,其值为6
Dijkstra算法研究的是单源最短路径(single-source shortest paths)问题,即给定带权图 G = <V,E>,其中每条边 $(v_i,v_j)$ 上的权 $W[v_i,v_j]$ 是一个非负实数。计算从任给的一个源点s到所有其他各结点的最短路径。
Dijkstra算法的基本思想是使用贪心法维护一个数据结构,记录当前两点间的最短路径,然后不断更新路径值,直到找到最终解。
function dijkstra(v1,v2):
//初始化所有节点的cost值
for v in all vertexes{
v.cost = maximum
}
v1.cost = 0
//创建一个最小堆保存顶点,优先级最低的顶点在堆顶部
priority_queue pq(v1.cost);
while !(pq.empty()){
v = pq.front(); //弹出优先级最低的vertex
v.status = visited
if v == v2:
//找到v2
break;
//遍历v的每一个未被访问的相邻节点
for n : v.unvisited_neighbors:
//计算到达n的cost
cost := v.cost + weight of edge(v,n)
if cost < n.cost:
n.cost = cost
//记录前驱节点
n.prev = v
pq.push( n.cost )
}
//使用v2的前驱节点,重建到v1的路径
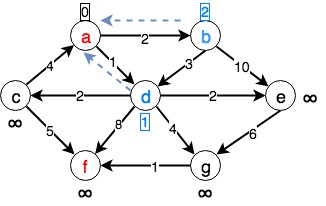
上述是Dijkstra算法的伪码,我们通过下面一个例子看看它是如何工作的。如下图所示,假设我们要求从$\{a,f\}$的权值最短路径。
-
初始化各节点的cost为无穷大,令
a的cost为0,放入优先级队列pq -
从pq中取出顶部节点,访问它的相邻节点
b,d,计算到达b,d的cost,分别为2,1,由于2,1均小于b,d原来的cost(无穷大),因此将b,d的cost更新,放入到优先队列,第一次选择(循环)结束,此时队列中的顶点为pqueue = {d:1,b:2} -
重复步骤2,pq顶部的节点为
d,找到d相邻的节点c,f,g,e分别计算各自的权重为3,9,5,3,均小于各自cost值(无穷大),因此c,f,g,e入队,第二次循环结束,此时队列中的顶点为pqueue = {b:2,c:3,e:3,g:5,f:9} -
重复步骤2,pq顶部的节点为
b,找到b相邻的节点d,e,由于d在上一步中已经被访问了,于是略过d,计算b到e的cost为2+10=12,大于e在上一步得到的cost3,因此直接返回。第三次循环结束,此时队列中的顶点为pqueue = {c:3,e:3,g:5,f:9} -
重复步骤2,pq顶部的节点为
c,找到d相邻的节点f,计算到达f的权重为8,小于队列中的9,说明该条路径优于第三步产生的路径,于是更新f的cost为8,更新f的前驱节点为c。第四次循环结束,此时队列中的顶点为pqueue = {e:3,g:5,f:8} -
重复步骤2,pq顶部的节点为
e,找到e相邻的节点g,计算e到g的cost为3+6=9,大于g在之前得到的cost5,因此直接返回。第五次循环结束,此时队列中的顶点为pqueue = {g:5,f:8} -
重复步骤2,pq顶部的节点为
g,找到g相邻的节点f,计算g到f的cost为5+1=6,小于f在之前得到的cost8,说明从g到达f这条路径更优,于是更新f的cost为6,更新f的前驱节点为g,此次循环结束,此时队列中的顶点为pqueue = {f:8} -
重复步骤2,发现已经到达节点
f因此整个循环结束。然后从f开始根据前驱节点依次回溯,得到路径f<-g<-d<-a,为权值最优路径。
从上面的求解过程可以发现Dijkstra算法实际上是一种贪心算法,即每一步都找当前最优解(最小堆堆顶元素)。对于贪心法,它实际上是动态规划算法的特例,因此要求每一步的重复子结构解具有无后效性。对应到Dijkstra算法,要求路径的权值不能为负数。因为如果出现负数,当前的最优选择在后面不一定是最优。
- Dijkstra算法时间复杂度
对于稀疏图,Dijkstra算法使用最小堆实现效率较高:
- 初始化: $O(v)$
- While循环: $O(v)$
- remove vertex from pq: $O(\log{V})$
- potentially perform E updates on cost/previous
- update costs in pq: $O(\log{V})$
- 路径重建: $O(E)$
- 总的时间复杂度为: $O(V\log{V}+E\log{V}) = O(E\log{V})$ (如果图是连通的,有$V=O(E)$)
A* 算法
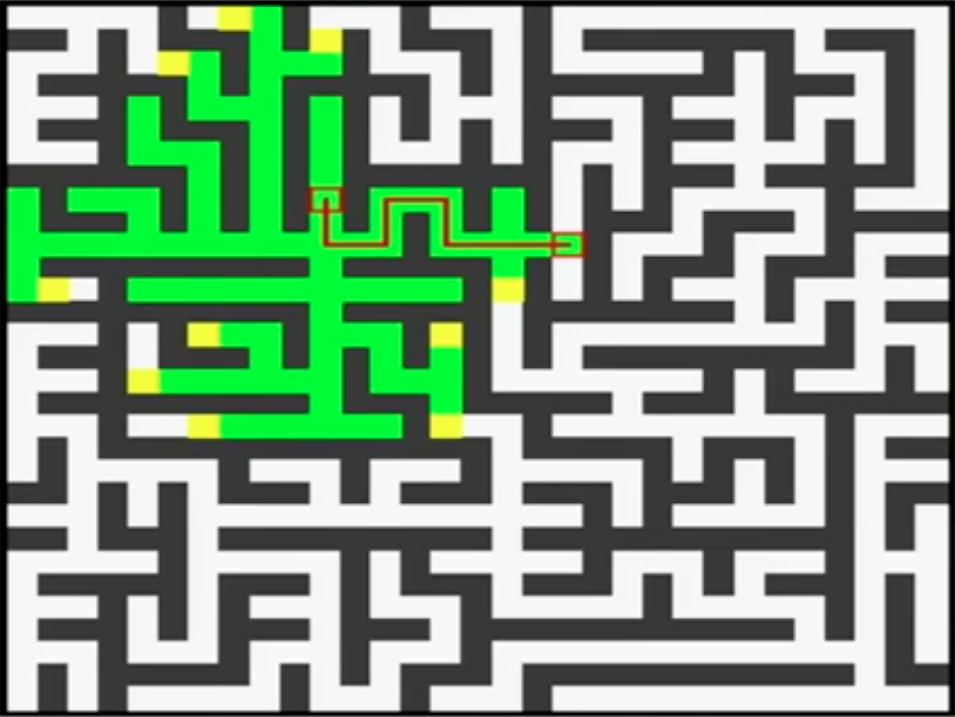
A*是另一种寻找权值最优路径的方法,它是对Dijkstra算法的一种改进。Dijkstra虽然可以找到最短路径,但是BFS的寻找过程却不是最高效的,如下图所示
假设我们要从中心点走到最右边的点,由于从中心扩散出去的每个点权值都相同,Dijkstra算法会在四个方向上不断尝试每个扩散出去的点,显然,这种搜法包含大量的无效搜索。仔细思考不难发现,其原因在于Dijkstra算法基于贪心策略每次只能确定当前最短距离,而不知道哪个方向才能逼近终点,如下图中,Dijkstra每次只能确定由a节点确定b节点,而对于终点c在哪则毫无所知,没有任何信息:

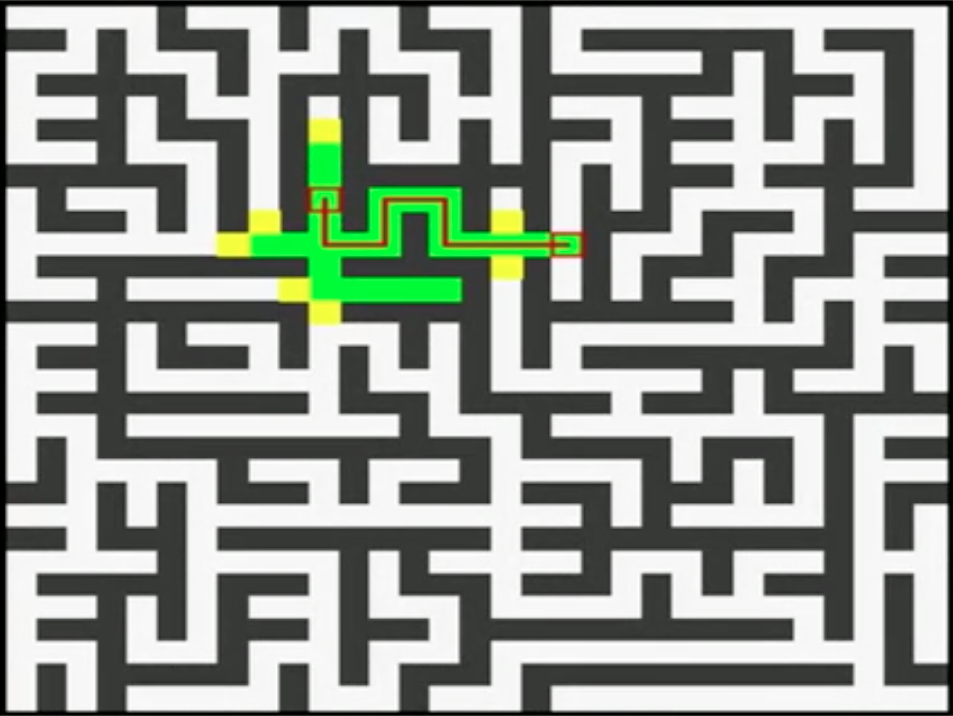
针对这个问题,A*算法改进了Dijkstra,引入了一个Heuristic的估计函数来来确定节点的扩散方向,使其可以沿着终点方向逼近,如下图所示

在引入了一个Heuristic函数后,我们相当于知道了一些额外的信息,这些信息可以帮助我们减少不必要的搜索。假设我们想要找从a到c的权值最小路径,对于任何中间节点b,我们要计算两个值
- 从
a到b确定的权值(同Dijkstra) - 从
b到c的估计值(estimated cost)
A*的整体算法框架同Dijkstra相同,只需要将最小堆中存放的cost改为cost(n) + H(n,target)即可
v1.cost = H(v1,v2)
priority_queue pq(v1);
//...
pq.push( n.cost + H(n,v2) )
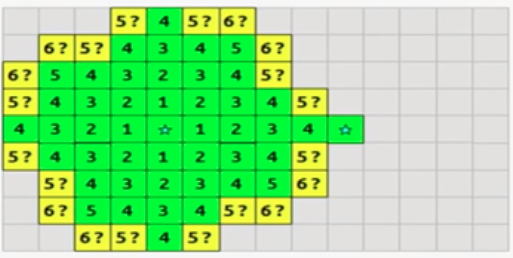
A* 算法的难点在于如何找到合适的Heuristic函数,不同的搜索场景,使用的Heuristic也不相同,例如下面场景,我们希望从a走到c:
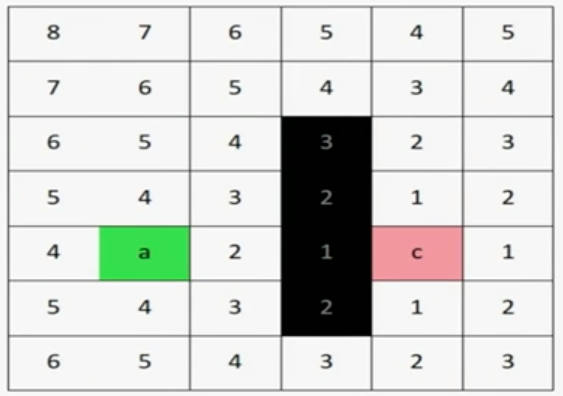
此时可以将Heuristic函数定义为:H(p1,p2) = abs(p1.x-p2.x) + abs(p1.-p2.y),则根据这个公式计算出的cost值如上图中每个格子所示,可以看到,从a点扩散出去的节点不再是等cost的,而是越偏向c点,cost的值越低。
关于Heuristic函数有一点需要特别注意的是,对终点cost的估计不能over estimate,也就是估计出来的值比实际值要大很多,这样会导致真实的最短路径一直被压在最小堆中,产生不必要的冗余计算。虽然Heuristic函数不可以over estimate,但是却可以under estimate。
最后我们以一个迷宫的例子来直观的比较一下Dijkstra和A*算法的效率,如下图所示,左边为Dijkstra算法结果,需要走103步,右边是A*算法,只需要25步(图中格子之间路径的cost均为1)