
贝叶斯模型
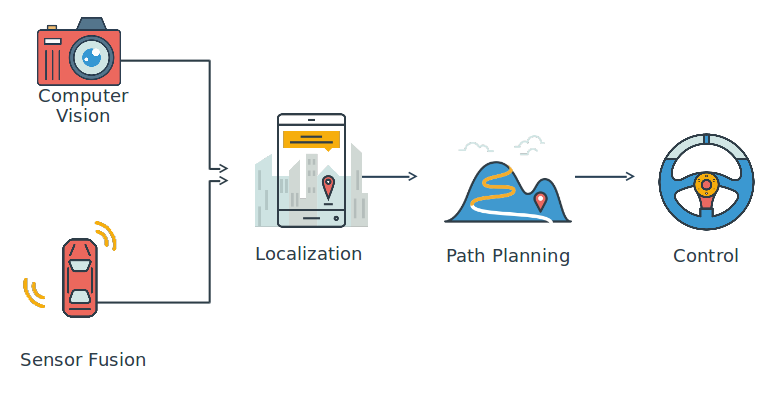
Course Notes from Udacity Self-Driving Car Nanodegree Program
贝叶斯模型概述
在现实的生活中,我们对某事的判断往往有一个先验概率,比如今天是阴天,感觉下雨的概率是50%,这些先验概率可以来自我们的经验,也可以来自一些统计数据。但是我们都知道,经验往往是靠不住的,因此先验概率往往是不够精确的,为了得到更精确的结果,我们需要引入一些额外的信息,这些信息可以帮助我们矫正之前的先验概率,比如,天气预报说今天有雨,那么我们会觉得今天下雨的可能性增大了。换一种说法,通过引入的额外信息,我们可以重新计算出一个新的概率,称为后验概率,这个概率比先验概率更准确,这就是贝叶斯模型的大概含义。
条件概率公式
要理解贝叶斯模型,先要复习一下什么是条件概率和全概率。所谓条件概率是指在某件事发生的前提下,另一件事发生的概率。和独立概率比起来条件概率不是很好理解,因为平时生活中能直接使用上这种概率的机会比较少,一个经典条件概率实验是红蓝球实验:
一个袋子中有2颗蓝球和3颗红球,每次从袋子里拿一颗,拿完不放回,问连续两次都拿到蓝球的概率是多少?
按照上面给出的条件,在开始时袋子里一共有5球,第一次拿到红球或者蓝球的概率是独立的,即拿到红球概率为3/5,拿到蓝球的概率为2/5。当第一次拿完后,袋子里的球变成了4个,此时袋子里红篮球的比例受第一次拿球操作的影响,即如果第一次拿的是红球,那么袋子里剩下的是2个蓝球+2个红球,那么第二次拿蓝球的概率为2/4,如果第一次拿的是蓝球,那么袋子里剩下的是3个红球和1个蓝球,则第二次拿到蓝球的概率为1/4,则两次都拿到蓝球的概率为2/5 x 1/4 = 1/10
上面例子中,第二次拿球的概率受第一次拿球的结果的影响,我们可以说第二次拿到某个球的概率是一种“条件概率”。条件概率可以用文氏图来表达,例如我们想要表达在B发生的条件下A发生的概率,用文氏图可以表示如下
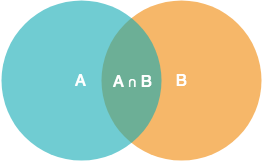
根据文氏图,可以很直观地看到在事件A发生的情况下事件B发生的概率是交集部分的概率,因此,对于条件概率也可以这么理解,我们假设事件A有N个样本,某一次事件A发生了,其中有M个样本恰好是B的样本,则条件概率为M/N,它可以认为是在A的样本中寻找B的份额占比。
如果用数学符号表达条件概率,则可以按照如下方式推导:
- $P(A) \thinspace = N \thinspace / \thinspace 样本空间 $
- $P(A∩B) \thinspace = M \thinspace / \thinspace 样本空间 $
- $P(B|A) \thinspace = M/N = P(A∩B)/P(A)$
其中$P(A∩B)$表示A和B的联合概率分布也可表示为$P(A,B)$或$P(AB)$,通常这部分交集不太好寻找,但是由于$P(A∩B)$等于$P(B∩A)$,因此可以将问题转化为
\[P(A|B) \thinspace = \thinspace \frac{P(A∩B)}{P(B)}\]这个就是条件概率公式,将AB交集部分化简掉,可以得到
\[\\P(A|B) \thinspace = \thinspace \frac{P(B|A)P(A)}{P(B)}\]条件概率有时也被称作后验概率。为了加深对条件概率的理解,我们再来看一个条件概率的例子,这个例子是说:在一个4条车道的高速路上,车有两种行驶状态,一种是高速行驶,另一种是非高速行驶,高速行驶的车必须在最左侧的车道上,现在有下面一些统计数据:
- 任何时候行驶,有20%的车辆行驶在最左侧车道上
- 高速上40%的车都是高速行驶的车
- 对于行驶在最左车道上的车,有90%的车是高速行驶的
有了上述信息,现在想要知道如果一辆车是高速行驶的,那么它位于最左面车道的概率是多少?
这个问题并不难解,可直接套用上面公式,由于篇幅原因,这里略去推导过程,直接给出结果
\[P(L|F) \thinspace = \thinspace \frac{ P(F|L)P(F) } {P(L)} \thinspace = \thinspace \frac{0.9 \thinspace \times \thinspace 0.2} {0.4} \thinspace = \thinspace 0.45\]全概率公式
为了理解贝叶斯定理,除了条件概率以外,我们还需要推倒一下全概率公式,如果理解了条件概率,那么全概率公式理解起来就相对比较简单,我们还用文氏图来表达
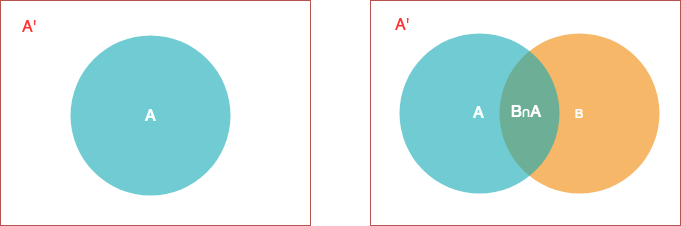
左图中,A和A'构成样本空间S,即 P(A)+P(A')=1。在这种情况下,右图中B发生的概率为B和A的交集加上B和A’的交集,即 P(B) = P(B∩A) + p(B∩A'),有前面的推导可知,P(B∩A)=P(B|A)P(A),带入化简,得到全概率公式:
它的含义是,如果A和A'构成样本空间的一个划分,那么事件B的概率,就等于A和A'的概率分别乘以B对这两个事件的条件概率之和。即在A发生的条件下B发生的概率加上在A没发生的条件下B发生的概率。为了加深对全概率公式的理解,我们同样给出一个例子:
- 1%的人会的癌症
- 在得癌症的人中,90%的癌症检测结果都是阳性
- 在没有得癌症的人中,10%的人检测结果是假阳性(意思是这些人没有得癌症,却被误诊为癌症)
现在的问题是,如果一个人去检查癌症的结果是阳性,那么它有多大几率得癌症?
我们令换癌症的概率为P(C),检测结果为阳性的概率为P(Pos),则有:P(C)=0.01,P(Pos|C)=0.9,P(Pos|C')=0.1;问题是求解P(C|Pos)。由条件概率公式可得
这时我们发现P(Pos)未知,因此暂时求不出来P(C|Pos),但是这里忽略了一个条件,即P(Pos|C')=0.1没有用上,参考上面全概率公式,我们可以按照如下式子求解P(Pos)
将该值代入到上式,可得
\[P(C|Pos) \thinspace = \thinspace \frac{0.9 \times 0.01 }{0.108} \thinspace = \thinspace 0.083\]贝叶斯定理
有了前面的铺垫,我们可以先给出贝叶斯公式,然后再讨论其含义,将上面条件概率变形得到:
\[P(A|B) = P(A) \frac{P(B|A)}{P(B)}\]其中P(A)称为”先验概率”(Prior probability),即在B事件发生之前,我们对A事件概率的一个判断。P(A|B)称为”后验概率”(Posterior probability),即在B事件发生之后,我们对A事件概率的重新评估。P(B|A)/P(B)称为”可能性函数”(Likelyhood),这是一个调整因子,使得预估概率更接近真实概率。所以,条件概率可以理解成下面的式子:
这就是贝叶斯推断的含义。我们先预估一个”先验概率”,然后加入实验结果,看这个实验到底是增强还是削弱了”先验概率”,由此得到更接近事实的”后验概率”。如果”可能性函数P(B|A)/P(B)>1,意味着”先验概率”被增强,事件A的发生的可能性变大;如果"可能性函数"=1,意味着B事件无助于判断事件A的可能性;如果"可能性函数"<1,意味着”先验概率”被削弱,事件A的可能性变小。
我们还是用一个例子来加深一下对贝叶斯定理的理解,只不过这次不需要计算,例子还是上面计算癌症概率的问题,对于上述例子中。我们先有了一个患癌症的先验概率P(C)=0.01,由于这个数据包含着一定的误差,为了矫正这个误差我们引入了癌症测试,即我们需要统计所有癌症测试为阳性的癌症概率,而这个结果就是我们希望得到的后验概率P(C|Pos),理论上它要比先验概率更精确,于是将上个例子中的公式修改一下,可以得到下面的式子
贝叶斯定理也可以用来计算多个事件,比如有一个机器人,它在位于ABC三个区域内的概率均为1/3,如下所示,现在有如下数据

- $P(R|A)=0.9$ , 在A区域看到红色的概率为
0.9 - $P(G|B)=0.9$ , 在B区域看到绿色的概率为
0.9 - $P(G|C)=0.9$ , 在C区域看到绿色的概率为
0.9
求解如果机器人看到的是红色,那么它位于A,B,C三个区域的概率各自是多少?
首先我们还是有一个先验概率1/3,即机器人在每个区域内的概率均为0.333,接下来我们来计算调整因子,这次的计算方式和上面稍有不同,我们先计算三个区域的联合概率并求和,然后再分别计算各自的条件概率
- $P(A∩R) \thinspace = \thinspace P(R|A) \times P(A) \thinspace = \thinspace 0.9 \times 0.3 \thinspace = \thinspace 0.3 $
- $P(B∩R) \thinspace = \thinspace P(R|B) \times P(A) \thinspace = \thinspace (1-0.9) \times 0.3 \thinspace = \thinspace 0.033 $
- $P(C∩R) \thinspace = \thinspace P(R|A) \times P(A) \thinspace = \thinspace (1-0.9) \times 0.3 \thinspace = \thinspace 0.033 $
有了上面联合概率分布,就可以计算机器人处在任何位置看见红色的概率
\[P(R) \thinspace = \thinspace P(A∩R) + P(B∩R) + P(C∩R) \thinspace = \thinspace 0.56\]和前面计算不同的是,这里计算$P(R)$并没有直接套用全概率公式,而是分步进行的(如果将上面式子展开成全概率公式,则非常复杂),有了$P(R)$就可以直接计算各自的条件概率
- $P(A|R) \thinspace = \thinspace \frac {P(R∩A)}{P(R)} \thinspace = \thinspace \frac{0.3}{0.56} \thinspace = \thinspace 0.818 $
- $P(B|R) \thinspace = \thinspace \frac {P(B∩A)}{P(R)} \thinspace = \thinspace \frac{0.033}{0.56} \thinspace = \thinspace 0.091 $
- $P(C|R) \thinspace = \thinspace \frac {P(C∩A)}{P(R)} \thinspace = \thinspace \frac{0.033}{0.56} \thinspace = \thinspace 0.091 $
从这个例子,我们更可以看出,所谓计算贝叶斯概率或者是条件概率都是在求解一个比值,这个比值为"两个事件联合概率/某个事件单独发生的概率"。而从结果上看,我们通过引入其他信息(机器人识别颜色的概率)重新校准了先验概率,使后面的预测更加准确。
至此,我们可以先总结一下贝叶斯公式的计算步骤:
- 得到某件事情发生的先验概率 $P(H)$,进而的到 $P(H’)$
- 根据已有的先验信息,进行某种试验$T$,观察试验结果,得到条件概率: $P(T|H)$ 以及 $P(T|H’)$ , 进而得到 $P(T’|H) = 1-P(T|H) $
- 计算先验概率和试验概率的联合概率:
- $ P(T,H) = P(T|H)*P(H) $
- $ P(T,H’) = P(T|H’)*P(H’) $
- 计算试验结果出现的概率,即全概率: $P(T) = P(T,H) + P(T,H’)$
- 计算贝叶斯概率,即通过试验矫正后的概率:$P(H|T) = \frac {P(T|H)*P(H)}{P(T)} $
自动驾驶中的贝叶斯模型
贝叶斯定理在自动驾驶领域应用非常广泛也非常重要,我们可以通过某种先验信息-比如GPS定位,先得到车的一个初步位置,通常来说这个初步位置和真实位置有5m左右的误差(GPS误差),如下图左边所示
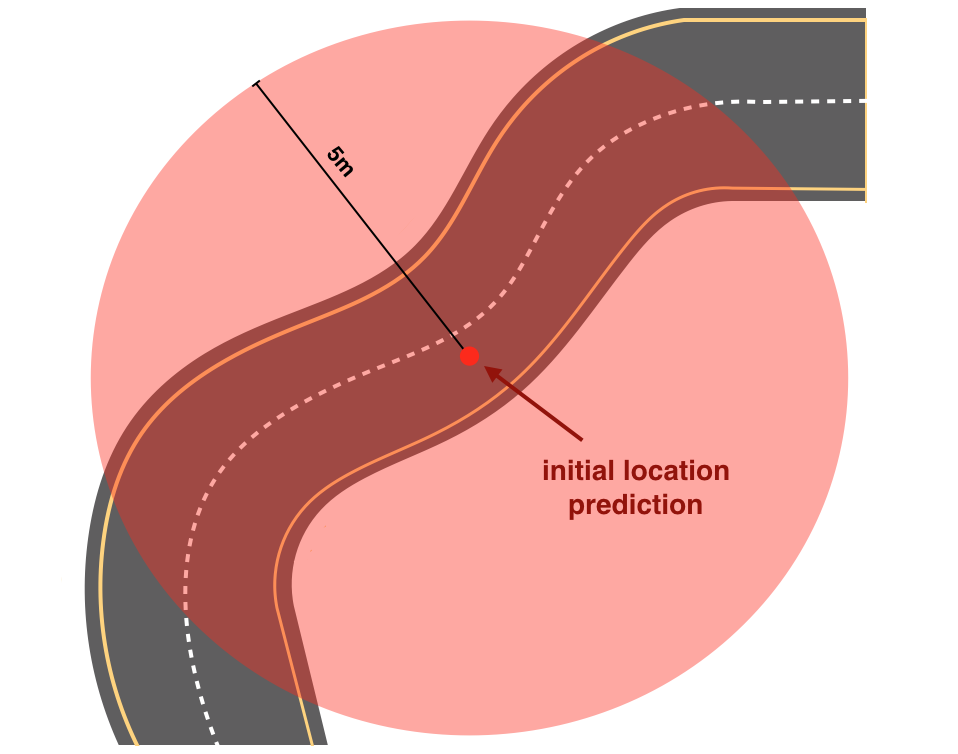
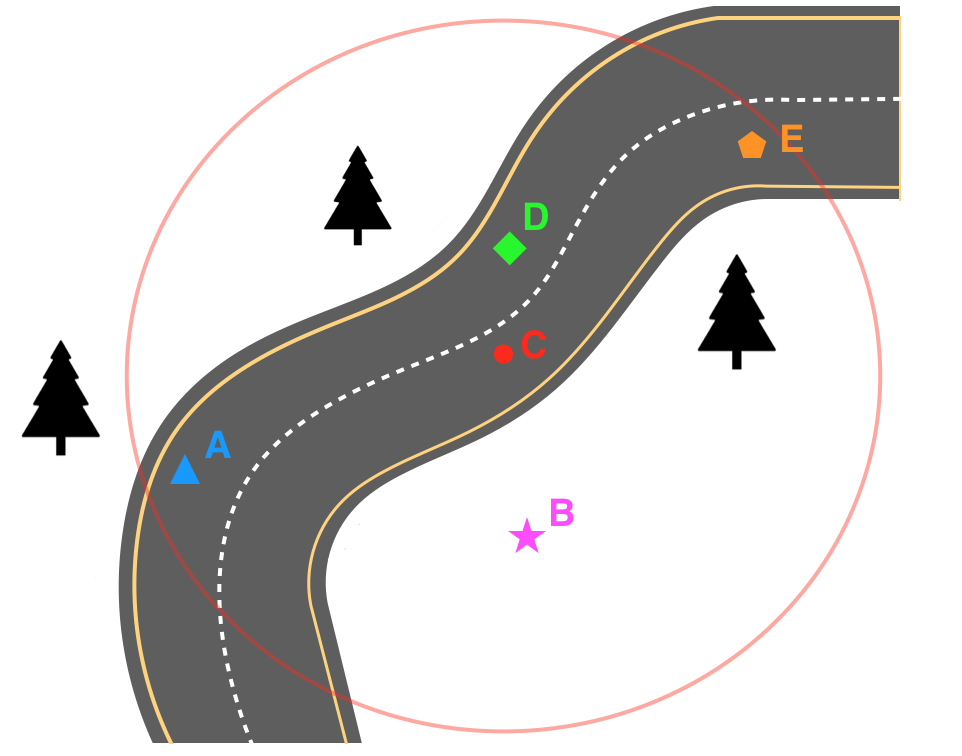
显然,5m的误差对于行驶在路上的汽车来说是不可接受的,因此我们还需要通过车各种传感器收集更多的收据来矫正车的位置,常用外部传感器有
- Carmera,采集图像
- Lidar,360度激光测距
- Radar,360度雷达扫描
除了外部传感器,车内部传感器也会收集车当前的状态信息,比如车速,朝向,车轮朝向等。现在假设有一辆车,通过GPS定位的位置在C(如右图所示)通过这些传感器收集到的信息有:
- 车正在上坡
- 车左边有一棵树
- 车轮指向右边
我们可以通过这些数据来重新矫正车的位置(虽然现在还不知道该如何矫正,但是可以获得一些感性的认识),上面的例子中,矫正之后的点是A点。在下一篇文章中,我们将会详细分析机器人的定位原理。
(全文完)
Resources
附录
Solution code for project Joy Ride:
car_parameters = {"throttle": 0, "steer": 0, "brake": 0}
def control(pos_x, pos_y, time, velocity):
""" Controls the simulated car"""
global car_parameters
if(time < 3):
car_parameters["throttle"] = -1.0
car_parameters["steer"] = 1
car_parameters["brake"] = 0
elif(pos_y > 32):
car_parameters["throttle"] = -1.0
car_parameters["steer"] = -1
car_parameters["brake"] = 0
else:
car_parameters["throttle"] = 0
car_parameters["steer"] = 0
car_parameters["brake"] = 1
return car_parameters
import src.simulate as sim
sim.run(control)