
神经网络
文中所用到的图片部分截取自Andrew Ng在Cousera上的课程
逻辑回归的问题
神经网络目前是一个很火的概念,在机器学习领域目前还是主流,之前已经介绍了线性回归和逻辑回归,为什么还要学习神经网络?以non-linear classification为例,如下图所示
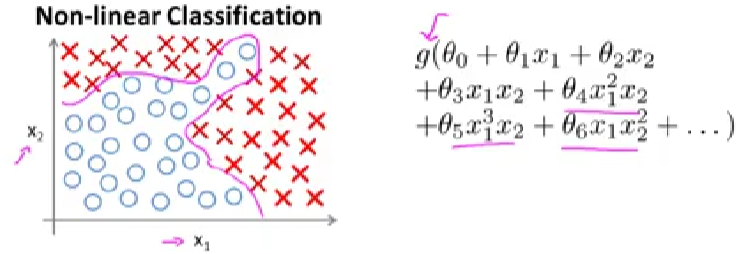
我们可以通过构建对feature的多项式$g_\theta$来确定预测函数,但这中方法适用于feature较少的情况,比如上图中,只有两个feature: $x_1$和$x_2$。
当feature多的时候,产生多项式就会变得很麻烦,还是预测房价的例子,可能的feature有很多,比如:
x1=sizex2=#bedroomsx3=#floorsx4=age- …
x100=#schools
等等,假设n=100,有几种做法:
- 构建二阶多项式
- 如$x_1^{2}$,$2x_1$,$3x_1$,…,$x_2^{2}$,$3x_2$…有约为5000项(n^2/2),计算的代价非常高。
- 取一个子集,比如
x1^2, x2^2,x3^2...x100^2,这样就只有100个feature,但是100个feature会导致结果误差很高
- 构建三阶多项式
- 如
x1x2x3, x1^2x2, x1^2x3...x10x11x17..., 有约为n^3量级的组合情况,约为170,000个
- 如
另一个例子是图像识别与分类,例如识别一辆汽车,对于图像来说,是通过对像素值进行学习(车共有的像素特征vs非汽车特征),那么feature就是图片的像素值,如下图所示,假如有两个像素点是车图片都有的:
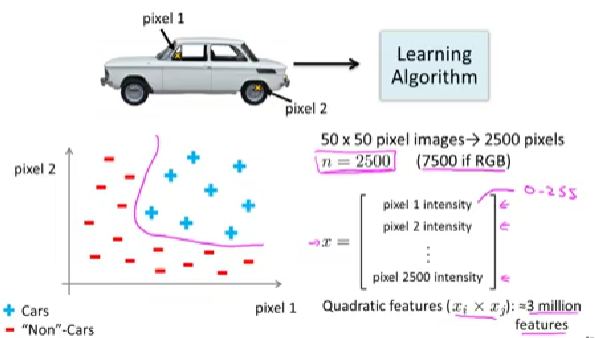
假设图片大小为50x50,总共2500个像素点,即2500个feature(灰度图像,RGB乘以三),如果使用二次方程,那么有接近300万个feature,显然图像这种场景使用non linear regression不合适,需要探索新的学习方式
单层神经网络
所谓神经元(Neuron)就是一种计算单元,它的输入是一组特征信息$x_1$…$x_n$,输出为预测函数的结果。
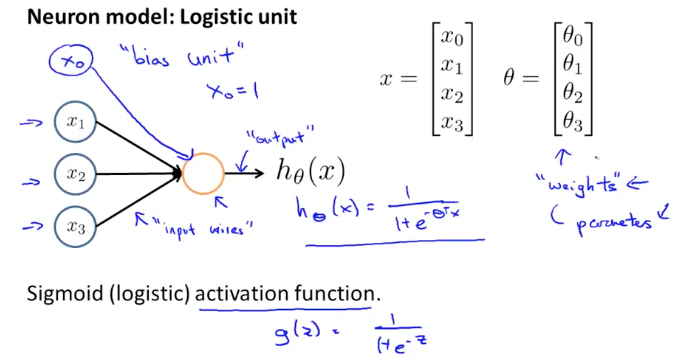
如上图,是一个单层的神经网络,其中:
- 输入端$x_0$默认为1,也叫做”bias unit.”
- $\theta$矩阵在神经网络里也被叫做权重weight矩阵
对于上述单层神经网络的输出函数$h_\theta(x)$,可以表示为
\[h_\theta(x) = g(\theta^Tx) = g(\theta_0 + \theta_1x_1 + \theta_2x_2 + \theta_3x_3 + \theta_4x_4)\]其中,$\theta_0$为bias uint,g为sigmoid函数$\frac{1}{1+e^{-z}}$,作用是将输出的值映射到[0,1]之间。因此最终的输出函数也可以写作
公式有些抽象,我们看看如何用Pytorch来实现
import torch
def activation(x):
return 1 / (1+torch.exp(-x))
## Generate some data
torch.manual_seed(7) #set the random seed so things are predictable
## Features are 5 random normal variables
features = torch.randn((1,5)) #1x5
# True weights for our data, random normal variables again
# same shape as features
weights = torch.randn_like(features) #1x5
#and a true bias term
bias = torch.randn((1,1))
# weights.view will convert the matrix to 5x1
# torch.mm does the matrxi multiplication
y = activation(bias + torch.mm(features, weights.view(5,1)))
多层神经网络
上述的神经网络只有输出端一个Neuron,属于比较简单的神经网络,我们再来看一个多个Neuron的两层神经网络,如下图所示
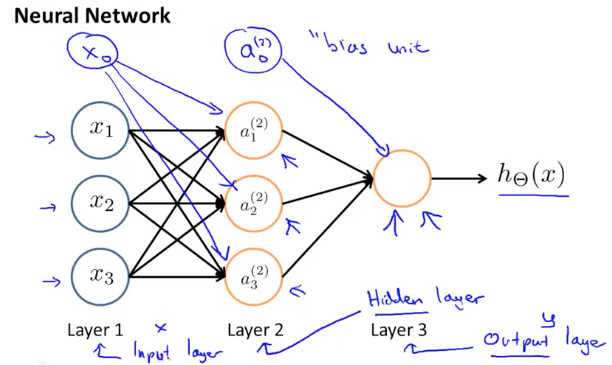
上述神经网络中的第一层是叫”Input Layer”,最后一层叫”Output Layer”,中间叫”Hidden Layer”,用$a_0^2…a_n^2$表示,他们也叫做”activation units.” 其中
- 输入层的$x_i$为样本feature,$x_0$作为”bias”
- 中间层的$a_i^{(j)}$ 表示第
j层的第i个节点,我们可以加入$a_0^{(2)}$作为”bias unit”,也可以忽略
对第二层每个activation节点的计算公式如下:
\[\begin{aligned} a_1^{(2)} = g(\theta_{10}^{(1)}x_0 + \theta_{11}^{(1)}x_1 + \theta_{12}^{(1)}x_2 + \theta_{13}^{(1)}x_3 ) \\ a_2^{(2)} = g(\theta_{20}^{(1)}x_0 + \theta_{21}^{(1)}x_1 + \theta_{22}^{(1)}x_2 + \theta_{23}^{(1)}x_3 ) \\ a_3^{(2)} = g(\theta_{30}^{(1)}x_0 + \theta_{31}^{(1)}x_1 + \theta_{32}^{(1)}x_2 + \theta_{33}^{(1)}x_3 ) \\ h_\theta(x) = a_1^{(3)} = g(\theta_{10}^{(2)}a_0^{2}+\theta_{11}^{(2)}a_1^{2}+\theta_{12}^{(2)}a_2^{2}+\theta_{13}^{(2)}a_3^{2}) \end{aligned}\]上面可以看到第一层Hidden Layer的参数,$\theta_{ij}$表示从节点i到节点j的权重值,$\theta^{(l)}$表示该权重位于第l层。如果单独看每一个a节点的值,会发现它和上述单层神经网络的计算方式一样,需要一个bias unit和$\theta$权重。 如上图中的$\theta$矩阵是3x4的,输入的feature矩阵是4x1的,这样相乘得出的第一层输出矩阵是3x1的,对应每个a节点的值。而整个神经网络最终输出结果是神经元a矩阵再乘以第二层Hidden Layer的参数矩阵$\theta^{(2)}$。由此我们可以推测出$\theta$矩阵的维度的计算方式为:
如果神经网络第
j层有$m$个单元,第j+1层有$n$个单元,那么$\Theta$矩阵的维度为$n \times (m+1)$
以上面的例子来说, 如果layer1有两个三个输入节点,即$m=3$, layer2 有三个activation节点,即$n=3$。那么$\Theta$矩阵是3x4的。 为什么要+1呢? 原因是在输入层(input layer)要引入$x_0$作为bias, 对应
为了简化上面Hidden Layer的式子,我们定义一个新的变量$z_k^{(j)}$来表示g函数的参数,则上述节点a的值可表示如下:
和前面一样,上脚标用来表示第几层layer,下脚标用来表示该layer的第几个节点。例如j=2时的第k个节点的值为
将上面式子做进一步推导并用向量表示为
\[a^{(j)} = g(z^{(j-1)}) \\ z^{(j-1)} = \theta^{(j-1)}a^{(j-1)}\]我们用结合上面的三层神经网络来简单验证下,假设j=3那么第三层神经网络节点的值$z^{(3)}$为
其中,上角标用来表示第几层layer,下角标表示该层的第几个节点。例如第2层的第k个节点的z值为:
\[z_k^{(2)} = \Theta_{k,0}^{(1)} x_0 + \Theta_{k,1}^{(1)} x_1 + \dots + \Theta_{k,n}^{(1)} x_n\]用向量表示 $x$ 和 $z^j$ 如下:
\[x = \begin{bmatrix} x_0 \\ x_1 \\ \vdots \\ x_n \end{bmatrix} \quad z^{(j)} = \begin{bmatrix} z_1^{(j)} \\ z_2^{(j)} \\ \vdots \\ z_n^{(j)} \end{bmatrix}\]令 $x$ 为第一层节点,即 $x = a^{(1)}$,则每层的向量化表示为:
\[z^{(j)} = \Theta^{(j-1)} a^{(j-1)}\]其中,$\Theta^{(j-1)}$ 是 $j \times (j+1)$ 的,$a^{(j-1)}$ 是 $(j+1) \times 1$ 的,因此 $z^{(j)}$ 是 $j \times 1$ 的,即:
\[a^{(j)} = g(z^{(j)})\]当我们计算完 $a^{(j)}$ 后,我们可以给 $a^{(j)}$ 增加一个 bias unit,即 $a_0^{(j)} = 1$,则 $a$ 变成了 $(j+1) \times 1$ 的。以此类推:
\[z^{(j+1)} = \Theta^{(j)} a^{(j)}\]最终的预测函数h表示为:
\[h_{\Theta}(x) = a^{(j+1)} = g(z^{(j+1)})\]注意到在每层的计算上,我们的预测函数和逻辑回归基本相同。我们增加了这么多层,即神经网络是为了更好的得到非线性函数的预测结果,这个算法也叫做Forward Propagation,后面简称FB算法,Octave实现为:
function g = sigmoid(z)
g = 1.0 ./ (1.0 + exp(-z));
end
function p = predict(Theta1, Theta2, X)
m = size(X, 1);
num_labels = size(Theta2, 1);
% You need to return the following variables correctly
p = zeros(size(X, 1), 1);
a1 = [ones(m, 1), X];
a2 = sigmoid(a1*Theta1');
a2 = [ones(m,1) a2];
h = sigmoid(a2*Theta2');
% Hint: The max function might come in useful. In particular, the max
% function can also return the index of the max element, for more
% information see 'help max'. If your examples are in rows, then, you
% can use max(A, [], 2) to obtain the max for each row.
%
[max,index] = max(h,[],2);
p = index;
end
Neural Network Example
- 单层神经网络实现与或门
神经网络的一个简单应用是预测 $x_1$ AND $x_2$,当 $x_1$ 和 $x_2$ 都为 1 的时候,结果是 true,预测函数如下:
\[\begin{bmatrix} x_0 \\ x_1 \\ x_2 \end{bmatrix} \quad \rightarrow \quad \begin{bmatrix} g(z^{(2)}) \end{bmatrix} \quad \rightarrow \quad h_{\Theta}(x)\] \[x_0 = 1,\quad \text{我们假设} \quad \Theta^{(1)} = \begin{bmatrix} -30 & 20 & 20 \end{bmatrix}\]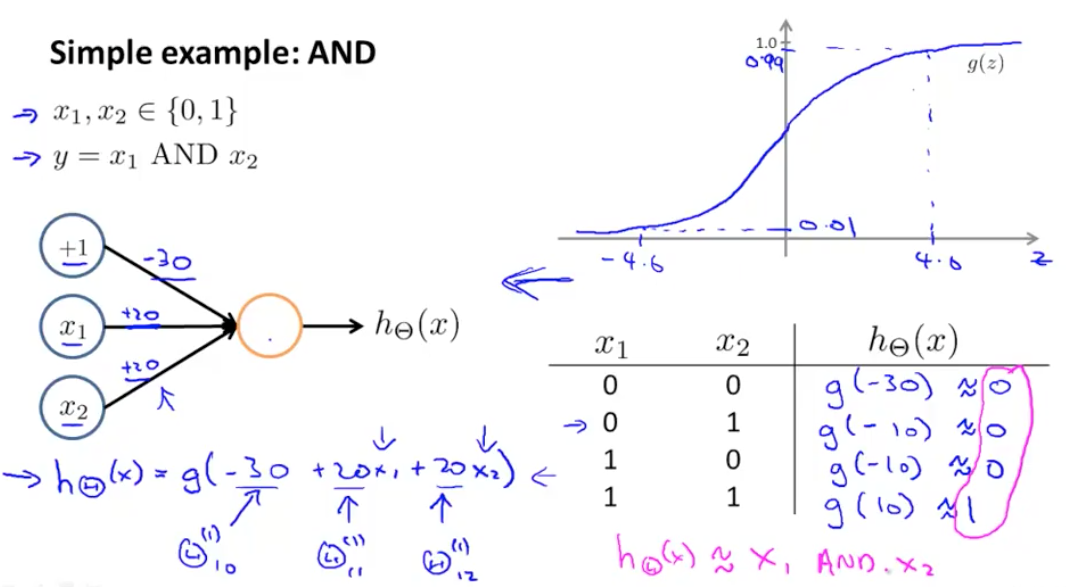
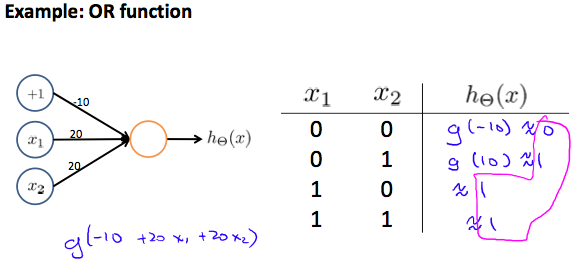
如图所示,我们构建了一个一层的神经网络来处理计算机的”AND”请求,来代替原来的“与门”。神经网络可用来构建所有的逻辑门,比如”OR”运算如下图:
- 二级神经网络构建同或门
上面我们实现了与或非(非的推导忽略),对应的$\Theta$矩阵如下:
\[\begin{aligned} \text{AND:} \quad & \Theta^{(1)} = \begin{bmatrix} -30 & 20 & 20 \end{bmatrix} \\[8pt] \text{NOR:} \quad & \Theta^{(1)} = \begin{bmatrix} 10 & -20 & -20 \end{bmatrix} \\[8pt] \text{OR:} \quad & \Theta^{(1)} = \begin{bmatrix} -10 & 20 & 20 \end{bmatrix} \end{aligned}\]我们可以通过上面的矩阵来构建XNOR门:
\[\begin{bmatrix} x_0 \\ x_1 \\ x_2 \end{bmatrix} \quad \rightarrow \quad \begin{bmatrix} a_1^{(2)} \\ a_2^{(2)} \end{bmatrix} \quad \rightarrow \quad \begin{bmatrix} a^{(3)} \end{bmatrix} \quad \rightarrow \quad h_{\Theta}(x)\]第一层节点的θ矩阵为:
\[\Theta^{(1)} = \begin{bmatrix} -30 & 20 & 20 \\ 10 & -20 & -20 \end{bmatrix}\]第二层节点的$\Theta$矩阵为:
\[\Theta^{(2)} = \begin{bmatrix} -10 & 20 & 20 \end{bmatrix}\]每层节点的计算用向量化表示为:
\[a^{(2)} = g(\Theta^{(1)} \cdot x)\] \[a^{(3)} = g(\Theta^{(2)} \cdot a^{(2)})\] \[h_{\Theta}(x) = a^{(3)}\]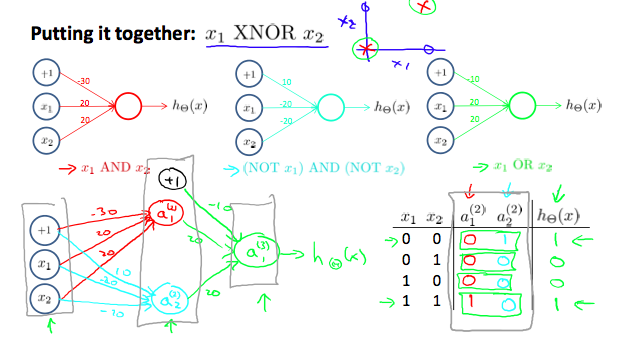
Multiclass Classification
使用神经网络进行多种类型分类的问题,我们假设最后的输出是一个向量,如下图所示
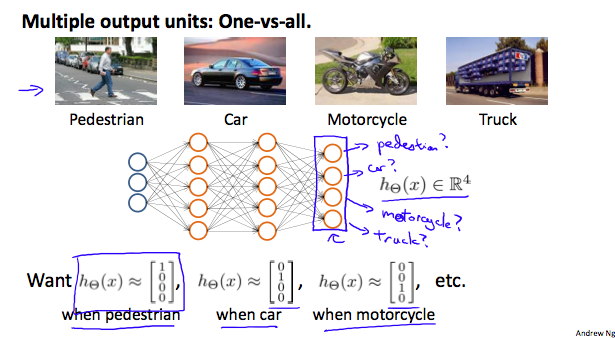
上面的例子中,对于输出结果y的可能情况有:
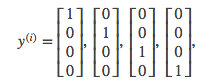
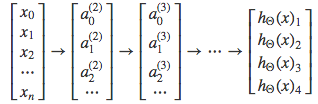
每一个 $y^{(i)}$ 向量代表一种分类结果,抽象来看,多级神经网络分类可如下表示:
Cost Function
- 先定义一些变量:
- $L$ = 神经网络的层数
- $S_l$ = 第 $l$ 层的节点数
- $K$ = 输出层的节点数,即输出结果的种类。
- 对 0 和 1 的场景,$K=1$,$S_l = 1$
- 对于多种分类的场景,$K \geq 3$,$S_l = K$
- 用 $h_{\Theta}^{(k)}(x)$ 表示第 $k$ 个分类的计算结果
- Cost Function
参考之前的逻辑回归cost函数:
\[J(\theta) = -\frac{1}{m} \sum_{i=1}^{m} \left[ y^{(i)} \log h_{\theta}(x^{(i)}) + (1 - y^{(i)}) \log (1 - h_{\theta}(x^{(i)})) \right] + \frac{\lambda}{2m} \sum_{j=1}^{n} \theta_j^2\]对神经网络来说,输出结果不再只有两种类型,而是有K种分类,cost函数也更加抽象和复杂:
\[J(\theta) = -\frac{1}{m} \sum_{i=1}^{m} \sum_{k=1}^{K} \left[ y_k^{(i)} \log h_{\theta}(x^{(i)})_k + (1 - y_k^{(i)}) \log (1 - h_{\theta}(x^{(i)})_k) \right] + \frac{\lambda}{2m} \sum_{l=1}^{L-1} \sum_{i=1}^{S_l} \sum_{j=1}^{S_{l+1}} \left( \theta_{j,i}^{(l)} \right)^2\]为了计算多个输出结果,括号前的求和表示对$K$层分别进行计算后再累加计算结果。中括号后面是regularization项,是每层$\theta$矩阵元素的平方和累加,公式里各层$\theta$矩阵的列数等同于对应层的节点数,行数等它对应层的节点数+1,其中
\[\sum_{i=1}^{S_l} \sum_{j=1}^{S_{l+1}} (\theta_{j,i}^{(l)})^2\]是每个$\theta$矩阵项的平方和,
\[\sum_{l=1}^{L-1}\]代表各个层$\theta$矩阵的平方和累加。理解了这两部分就不难理解regularization项了,它和之前逻辑回归的regularization项概念是一致的。
理解上述式子着重记住以下三点:
- 前两个求和符号是对每层神经网络节点进行逻辑回归cost function运算后求和
- 后面三个求和符号是是每层神经网络节点的θ矩阵平方和的累加求和
- 特殊注意的是,后面三个求和符号中第一个求和符号中的i代表层数的index,不代表训练样本的index
- Octave demo
假设有三层神经网络,已知权重矩阵Theta1,Theta2,代价函数使用代数形式描述为:
function [J grad] = nnCostFunction(num_labels,X, y, Theta1, Theta2, lambda)
% X:5000x400
% y:5000x1
% num_labels:10
% Theta1: 25x401
% Theta2: 10x26
% Setup some useful variables
m = size(X, 1);
J = 0;
% make Y: 5000x10
I = eye(num_labels);
Y = zeros(m, num_labels);
for i=1:m
Y(i, :)= I(y(i), :);
end
% cost function
J = (1/m)*sum(sum((-Y).*log(h) - (1-Y).*log(1-h), 2));
% regularization item
r = (lambda/(2*m))*(sum(sum(Theta1(:, 2:end).^2, 2)) + sum(sum(Theta2(:,2:end).^2, 2)));
% add r
J = J+r;
end
Backpropagation algotrithm
“Backpropagation”是神经网络用来求解Cost Function最小值的算法,类似之前线性回归和逻辑回归中的梯度下降法。上一节我们已经了解了Cost Function的定义,我们的目标是求解:
\[\min_{\Theta} J(\Theta)\]即找到合适的θ值使Cost Function的值最小,即通过一个合适的算法来求解对θ的偏导
\[\frac{\partial}{\partial \Theta_{i,j}^{(l)}} J(\Theta)\]我们先假设神经网络只有一个训练样本(x,y),我们使用“Forward Propagation”的向量化方式来逐层计算求解出最后的结果
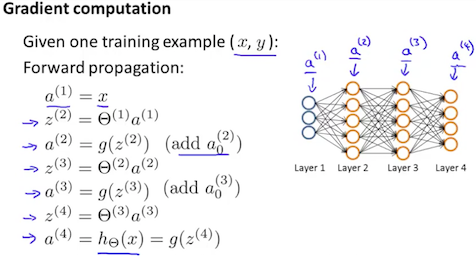
接下来我们要求θ矩阵的值,用到的算法叫做“Backpropagation”,我们定义:
\[\delta_j^{(l)} = \text{"error" of node } j \text{ in layer } l\]假设 Layer L=4 那么有:
\[\delta_j^{(4)} = a_j^{(4)} - y_j\]向量化表示为:
\[\delta^{(4)} = a^{(4)} - y\]其中,δ,a,y向量行数等于最后一层节点的个数,这样我们首先得到了最后一层的δ值,接下来我们要根据最后一层的δ值来向前计算前面各层的δ值,第三层的公式如下:
\[\delta^{(3)} = \left( \Theta^{(3)} \right)^T \delta^{(4)} \cdot g'(z^{(3)})\]第二层的计算公式如下:
\[\delta^{(2)} = \left( \Theta^{(2)} \right)^T \delta^{(3)} \cdot g'(z^{(2)})\]第一层是输入层,是样本数据,没有错误,因此不存在$\delta^{(1)}$
在上述的式子中,$g’(z^{(l)})$ 对 $z^{(l)}$ 的求导等价于下面式子:
\[g'(z^{(l)}) = g(z^{(l)}) \cdot (1 - g(z^{(l)}))\] \[g'(z^{(l)}) = a^{(l)} \cdot (1 - a^{(l)})\]因此我们可以看到所谓的Backpropagation Algorithm即是先计算最后一层的δ值,然后依次向前计算各层的δ值。
如果忽略regularization项,即$\lambda = 0$,我们能够发现如下式子:
\[\frac{\partial}{\partial \Theta_{i,j}^{(l)}} J(\Theta) = a_j^{(l)} \cdot \delta_i^{(l+1)}\]上面是Layer L=4的例子,让我们对Backpropagation Algorithm先有了一个直观的感受,接下来从通用的角度给出Backpropagation Algorithm的计算步骤
假设有训练集 ${(x^{(1)}, y^{(1)}), \dots, (x^{(m)}, y^{(m)})}$,令
-
对所有 $i$, $j$, $l$ ,令 $\Delta_{i,j}^{(l)} = 0$,得到一个全零矩阵
- For i=1 to m 做循环,每个循环体执行下面操作
- $a^{(1)} := x^{(t)}$ 让神经网络第一层等于输入的训练数据
- 对 $a^{(l)}$ 进行“Forward Propagation”计算,其中 l=2,3,…,L 计算过程如上文图示
- 使用 $y^{(t)}$ 来计算 $\delta^{(L)} = a^{(L)} - y^{(t)}$
- 根据 $\delta^{(L)}$ 向前计算 $\delta^{(L-1)}, \delta^{(L-2)}, \dots, \delta^{(2)}$,公式为:$\delta^{(l)} = ((\Theta^{(l)})^T \delta^{(l+1)}) \cdot a^{(l)} \cdot (1 - a^{(l)})$ 这个过程涉及到了链式法则,在下一节会介绍
- $\Delta_{i,j}^{(l)} := \Delta_{i,j}^{(l)} + a_j^{(l)} \delta_i^{(l+1)}$ 对每层的θ矩阵偏导不断叠加,进行梯度下降,前面的式子也可以用向量化表示 $\Delta^{(l)} := \Delta^{(l)} + \delta^{(l+1)} (a^{(l)})^T$
- 加上Regularization项得到最终的θ矩阵
- 当 j≠0 时,$ D_{i,j}^{(l)} \thinspace := \thinspace \frac{1}{m}(\Delta_{i,j}^{(l)} + \lambda \Theta_{i,j}^{(l)}), \thinspace if \thinspace $
- 当 j=0 时,$ D_{i,j}^{(l)} \thinspace := \thinspace \frac{1}{m}\Delta_{i,j}^{(l)} $
大写的D矩阵用来表示θ矩阵的计算是不断叠加的,我们最终得到的偏导式子为:
\[\frac{\partial{J(\Theta)}}{\partial\Theta_{ij}^{(l)}} \thinspace = \thinspace D_{(ij)}^{(l)}\]Backpropagation Intuition
这一小节对上面提到的Backpropagation(后面简称BP算法)做一个简单的数学推到,来搞清楚 $\delta_j^{(l)}$ 的计算过程。
还是先看Forward Propagation,我们还是拿前面的图距离,假设神经网络如下图
他只有一个输出节点,由之前提到的Forward Propagation得到的预测函数为:
\[h_\Theta(x) = a_1^{(3)} = g\left(\Theta_{10}^{(2)} a_0^{(2)} + \Theta_{11}^{(2)} a_1^{(2)} + \Theta_{12}^{(2)} a_2^{(2)} + \Theta_{13}^{(2)} a_3^{(2)}\right)\]这个函数中:
- $h_\Theta(x)$ 是以Θ为变量的函数
- 它的计算过程是从第一层开始向最后一层逐层计算,每一层每个节点的值是由它后一层的节点乘以权重矩阵Θ
BP的计算和推导不如Forward容易理解,也不直观,它的特点类和FB类似
- δ也是自变量为θ的函数
- 它的计算过程是从最后一层开始向第一层逐层计算,每层的δ值是由它前面一层的δ值乘以权重矩阵θ
- 它的计算包含两部分,第一部分是求梯度(对θ求偏导),第二部分是梯度下降
先说第一部分求梯度,由上节给出的代价函数为:
\[J(\Theta) = -\frac{1}{m} \sum_{i=1}^{m} \sum_{k=1}^{K} \left[ y_k^{(i)} \log(h_\Theta(x^{(i)})_k + (1 - y_k^{(i)}) \log(1 - h_\Theta(x^{(i)})_k) \right] + \frac{\lambda}{2m} \sum_{l=1}^{L-1} \sum_{i=1}^{s_l} \sum_{j=1}^{s_l+1} (\Theta_{j,i}^{(l)})^2\]如果将regularization项忽略,令K=1,对于单一节点$x^{(i)}$, $y^{(i)}$的代价函数简化为:
\[J(\Theta) = -y^{(i)} \log(h_\Theta(x^{(i)})) + (1 - y^{(i)}) \log(1 - h_\Theta(x^{(i)}))\]上面函数近似约等于:
\[J(\Theta) \approx (h_\Theta(x^{(i)}) - y^{(i)})^2\]其中 l 代表神经网络 layer 的 index,回忆这个函数的含义是计算样本 $(x^{(i)}, y^{(i)})$ 和预测结果的误差值,接下来的任务就是找到使这个函数的达到最小值的 Θ,找到的办法是通过梯度下降的方式,使 $J(\Theta)$ 沿梯度下降最快的方向达到极值(注意:$J(\Theta)$ 不是 convex 函数,不一定有最小值,很可能收敛到了极值点),梯度下降需要用到 $\frac{\partial J(\Theta)}{\partial \Theta_{ji}^{(l)}}$,并将计算结果保存到 $\Delta^{(l)}$ 中。
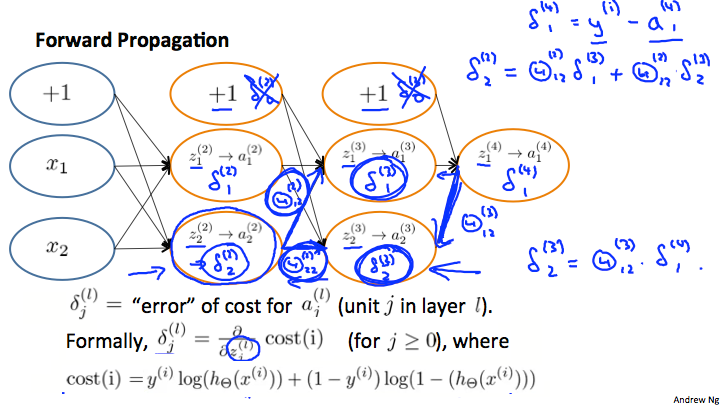
下面我们以3层神经网络为例,分解这个推导过程,神经网络如下图所示
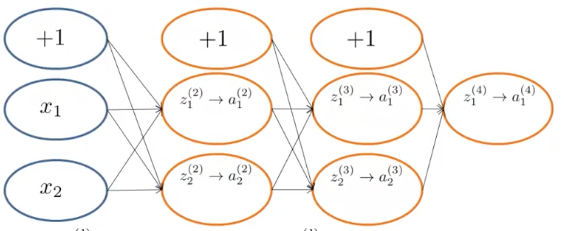
再来回顾一下各个变量的含义为:
- 另 $x_1$ 和 $x_2$ 表示神经网络的输入样本,两个特征
- 另 $z^{(l)}_j$ 表示第 $l$ 层的第 $j$ 个节点的输入值
- 另 $a^{(l)}_j$ 表示第 $l$ 层的第 $j$ 个节点的输出值
- 另 $\Theta^{(l)}_{ji}$ 表示第 $l$ 层到第 $l+1$ 层的权重矩阵
- 另 $\delta^{(l)}_j$ 表示第 $l$ 层第 $j$ 个节点的预测偏差值,他的数学定义为
我们的目的是求解 $\Theta$ 矩阵的值,以得出最终的预测函数,这个例子中以求解 $\Theta^{(3)}{11}$ 和 $\Theta^{(2)}{11}$ 为例
(1) 参考上面几节,我们令 $h_{\Theta}^{(t)} = g(z^{(t)}) = a^{(t)}$,其中 $g$ 为 sigmoid 函数$g(z) = \frac{1}{1 + e^{-z}}$
(2) 先求 $\Theta_{11}^{(3)}$,由链式规则,可以做如下运算:$ \frac{\partial J(\Theta)}{\partial \Theta_{11}^{(3)}} = \frac{\partial J(\Theta)}{\partial a_1^{(4)}} \cdot \frac{\partial a_1^{(4)}}{\partial z_1^{(4)}} \cdot \frac{\partial z_1^{(4)}}{\partial \Theta_{11}^{(3)}} $
(3) 参考上面 $\delta$ 的定义,可知上面等式后两项为:$ \delta_1^{(4)} = \frac{\partial J(\Theta)}{\partial a_1^{(4)}} \cdot \frac{\partial a_1^{(4)}}{\partial z_1^{(4)}} $ 即输出层第一个节点的误差值,展开计算如下:
\[\delta_1^{(4)} = \frac{\partial J(\Theta)}{\partial a_1^{(4)}} \cdot \frac{\partial a_1^{(4)}}{\partial z_1^{(4)}}\] \[= - \left[ y \cdot (1 - g(z)) + (y - 1) \cdot g(z) \right]\] \[= - \left[ y \cdot (1 - g(z)) + (y - 1) \cdot g(z) \right]\] \[= g(z) - y\]其中用到了 sigmoid 函数的一个特性: $g’(z) = g(z) \cdot (1 - g(z))$
(4) 这样我们得到了 $\delta_1^{(4)}$(参考上一节 BP 算法的步骤 (3)),接下来继续求解$\frac{\partial J(\Theta)}{\partial \Theta_{11}^{(3)}}$, 前面第二步等号后的最后一项$\frac{\partial z_1^{(4)}}{\partial \Theta_{11}^{(3)}}$, 将 $z_1^{(4)}$ 展开有:
\[z_1^{(4)} = \Theta_{10}^{(3)} \cdot a_0^{(3)} + \Theta_{11}^{(3)} \cdot a_1^{(3)} + \Theta_{12}^{(3)} \cdot a_2^{(3)}\]对$\Theta_{11}^{(3)}$ 求偏导的结果为 $a_1^{(3)}$
(5) 将第 4 步与第三步的式子合并,即得出 $\frac{\partial J(\Theta)}{\partial \Theta_{11}^{(3)}} = \delta_1^{(4)} \cdot a_1^{(3)}$, 与上一节 BP 算法步骤 (5) 一致
(6) 接下来计算 $\Theta_{11}^{(2)}$,链式规则可做如下运算:
\[\frac{\partial J(\Theta)}{\partial \Theta_{11}^{(2)}} = \frac{\partial J(\Theta)}{\partial a_1^{(4)}} \cdot \frac{\partial a_1^{(4)}}{\partial z_1^{(4)}} \cdot \frac{\partial z_1^{(4)}}{\partial a_1^{(3)}} \cdot \frac{\partial a_1^{(3)}}{\partial z_1^{(3)}} \cdot \frac{\partial z_1^{(3)}}{\partial \Theta_{11}^{(2)}}\](7) 参考上面 $\delta$ 的定义,可知
\[\delta_1^{(3)} = \frac{\partial J(\Theta)}{\partial a_1^{(4)}} \cdot \frac{\partial a_1^{(4)}}{\partial z_1^{(4)}} \cdot \frac{\partial z_1^{(4)}}{\partial a_1^{(3)}} \cdot \frac{\partial a_1^{(3)}}{\partial z_1^{(3)}}\]由上面的步骤 3 可知,等式的前两项为 $\delta_1^{(4)}$。这里可以看出对 $\delta$ 值的计算和之前的 FB 算法类似,如果将神经网络反向来看,当前层的 $\delta_1$ 值是根据后一层的 $\delta_{(1-1)}$ 计算得来。等式的第三项,将 $z_1^{(4)}$ 展开后对 $a_1^{(3)}$ 求导后得到 $\Theta_{11}^{(3)}$,等式最后一项为 \(g'(z_1^{(3)})\)
(8) 将上一步的结果进行整理得到: \(\delta_1^{(3)} = \delta_1^{(4)} \cdot \Theta_{11}^{(3)} \cdot g'(z_1^{(3)})\) 和上一节 BP 算步骤 (4) 一致
(9) 将 8 的结果带入第 6 步,可得出: \(\frac{\partial J(\Theta)}{\partial \Theta_{11}^{(2)}} = \delta_1^{(3)} \cdot \frac{\partial z_1^{(3)}}{\partial \Theta_{11}^{(2)}}\) 将 $z_1^{(3)}$ 展开后对 $\Theta_{11}^{(2)}$ 求导得到 $a_1^{(2)}$。
(10) 整理第 9 步结果可知: \(\frac{\partial J(\Theta)}{\partial \Theta_{11}^{(2)}} = \delta_1^{(3)} \cdot a_1^{(2)}\) 与上一节步骤(5)一致。
通过上面的推导,大概可以印证上一节的结论:
\[\frac{\partial J(\Theta)}{\partial \Theta_{ij}^{(l)}} = a_j^{(l)} \cdot \delta_i^{(l+1)}\]而关于对 $\delta_j^{(l)}$ 的计算则是 BP 算法的核心,继续上面的例子,计算 $\delta_2^{(3)}$ 和 $\delta_2^{(2)}$:
可以观察到 BP 算法两个突出特点:
-
自输出层向输入层(即反向传播),逐层求偏导,在这个过程中逐渐得到各个层的参数梯度。
-
在反向传播过程中,使用 δ(l)δ(l) 保存了部分结果,避免了大量的重复运算,因而该算法性能优异。
Implementation Note: Unrolling parameters
这一小节介绍如何使用Advanced optimization来计算神经网络,对于优化函数,前面有讲过,的定义如下:
function [jVal, gradient] = costFunction(theta)
...
optTheta = fminunc(@costFunction, initialTheta, options)
fminunc的第二个参数initialTheta需要传入一个vector,而我们之前推导的神经网络权重矩阵Θ显然不是一维的向量,对于一个四层的神经网络来说:
- Θ 矩阵:$\Theta^{(1)}$, $\Theta^{(2)}$, $\Theta^{(3)}$ - matrices ($\Theta_1$, $\Theta_2$, $\Theta_3$)
- 梯度矩阵:$D^{(1)}$, $D^{(2)}$, $D^{(3)}$ - matrices ($D_1$, $D_2$, $D_3$)
因此我们需要将矩阵转换为向量,在Octave中,可用如下命令
thetaVector = [ Theta1(:); Theta2(:); Theta3(:); ]
deltaVector = [ D1(:); D2(:); D3(:) ]
这种写法会将 3 个 $\Theta$ 矩阵排成一维向量,假设 $\Theta^{(1)}$ 是 $10 \times 11$ 的,$\Theta^{(2)}$ 是 $10 \times 11$ 的,$\Theta^{(3)}$ 是 $1 \times 11$ 的,也可以从 thetaVector 取出原始矩阵。
Theta1 = reshape(thetaVector(1:110),10,11)
Theta2 = reshape(thetaVector(111:220),10,11)
Theta3 = reshape(thetaVector(221:231),1,11)
总结一下:
- 前面得到的
thetaVector代入到fminunc中,替换initialTheta -
在
costFunction中,输入的参数是thetaVecfunction[jVal,gradientVec] = costFunction(thetaVec)在
costFunction中,我们需要使用reshape命令从theVec取出 $\Theta^{(1)}$, $\Theta^{(2)}$, $\Theta^{(3)}$ 用来计算 FB 和 BP 算法,得到 $D^{(1)}$, $D^{(2)}$, $D^{(3)}$ 梯度矩阵和 $J(\Theta)$,然后再 unroll $D^{(1)}$, $D^{(2)}$, $D^{(3)}$ 得到gradientVec。
Gradient Checking
在计算神经网络的梯度时,要确保梯度计算正确,最好在计算过程中进行Gradient Checking。对于代价函数在某个点导数可近似为:
\[\frac{\partial}{\partial \Theta} J(\Theta) \approx \frac{J(\Theta + \epsilon) - J(\Theta - \epsilon)}{2\epsilon}\]上面式子是单个Θ矩阵的梯度近似,对于过个Θ矩阵的梯度近似,计算方法相同:
\[\frac{\partial}{\partial \Theta_j} J(\Theta) \approx \frac{J(\Theta_1, \dots, \Theta_j + \epsilon, \dots, \Theta_n) - J(\Theta_1, \dots, \Theta_j - \epsilon, \dots, \Theta_n)}{2\epsilon}\]为了保证计算结果相近,其中 $\epsilon = 10^{-4}$,注意过小的ϵ会导致计算问题,由于我们只能对一个Θ矩阵进行ϵ的加减,对于多个Θ矩阵,在Octave中需要使用循环计算
epsilon = 1e-4;
for i = 1:n,
thetaPlus = theta;
thetaPlus(i) += epsilon;
thetaMinus = theta;
thetaMinus(i) -= epsilon;
gradApprox(i) = (J(thetaPlus) - J(thetaMinus))/(2*epsilon)
end;
得到近似的梯度之后,我们可以将计算得到的Appprox和上一节的deltaVector进行比较,查看是否gradApprox ≈ deltaVector,由于计算Approx代价很大,速度很慢,一般在确认了BP算法正确后,就不在计算Appox了
结合前一节做一个简单的总结:
- 通过实现 BP 算法得到 $\delta$ 矩阵
DVec(Unrolled $D^{(1)}$, $D^{(2)}$, $D^{(3)}$) - 进行梯度检查,计算
gradApprox - 确保计算结果足够相近
- 停止梯度检查,使用BP得到的结果
- 确保在用神经网络训练数据的时候梯度检查是关闭的,否则会非常耗时
###Random Initialization
计算神经网络,将 $\theta$ 初始值设为 0 不合适,这会导致在计算 BP 算法的过程中所有节点计算出的值相同。我们可以使用随机的方式产生 $\Theta$ 矩阵,比如将 $\Theta_{ij}^{(l)}$ 初始化范围控制在 $[-\epsilon, \epsilon]$:
Theta1=rand(10,11)*(2*INIT_EPSILON)-INIT_EPSILON #初始化10x11的矩阵
Theta1=rand(1,11)*(2*INIT_EPSILON)-INIT_EPSILON #初始化1x11的矩阵
rand(x,y)函数会为矩阵初始化一个0到1之间的实数,上面的INIT_EPSILON和上一节提到的ϵ不是一个ϵ。
小结
这一章先介绍了如何构建一个神经网络,包含如下几个步骤
- 第一层输入单元的个数 = 样本 $x^{(i)}$ 的维度
- 最后一层输出单元的个数 = 预测结果分类的个数
- Hidden Layer的个数= 默认为1个,如果有多余1个的hidden layer,通常每层的unit个数相同,理论上层数越多越好
接下来介绍了如何训练一个神经网络,包含如下几步
- 随机初始化Θ矩阵
- 实现 FP 算法,对任意样本 $x^{(i)}$ 得出预测函数 $h_{\Theta}(x^{(i)})$
- 实现代价函数
-
使用 BP 算法对代价函数求偏导,得到: \(\frac{\partial}{\partial \Theta_{ij}^{(l)}} J(\Theta)\)
- 使用梯度检查,确保BP算出的Θ矩阵结果正确,然后停止梯度检查
- 使用梯度下降或者其它高级优化算法求解权重矩阵Θ,使代价函数的值最小
不论是求解FP还是BP算法,都要loop每一个训练样本
for i = 1:m,
Perform forward propagation and backpropagation using example (x(i),y(i))
(Get activations a(l) and delta terms d(l) for l = 2,...,L)
BP梯度下降的过程如下图所示:
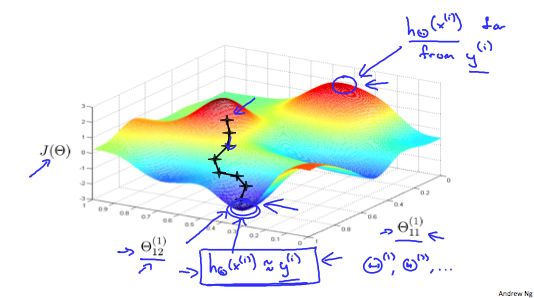
再回忆一下梯度下降,函数在极值点处的导数