
PyTorch实现GAN
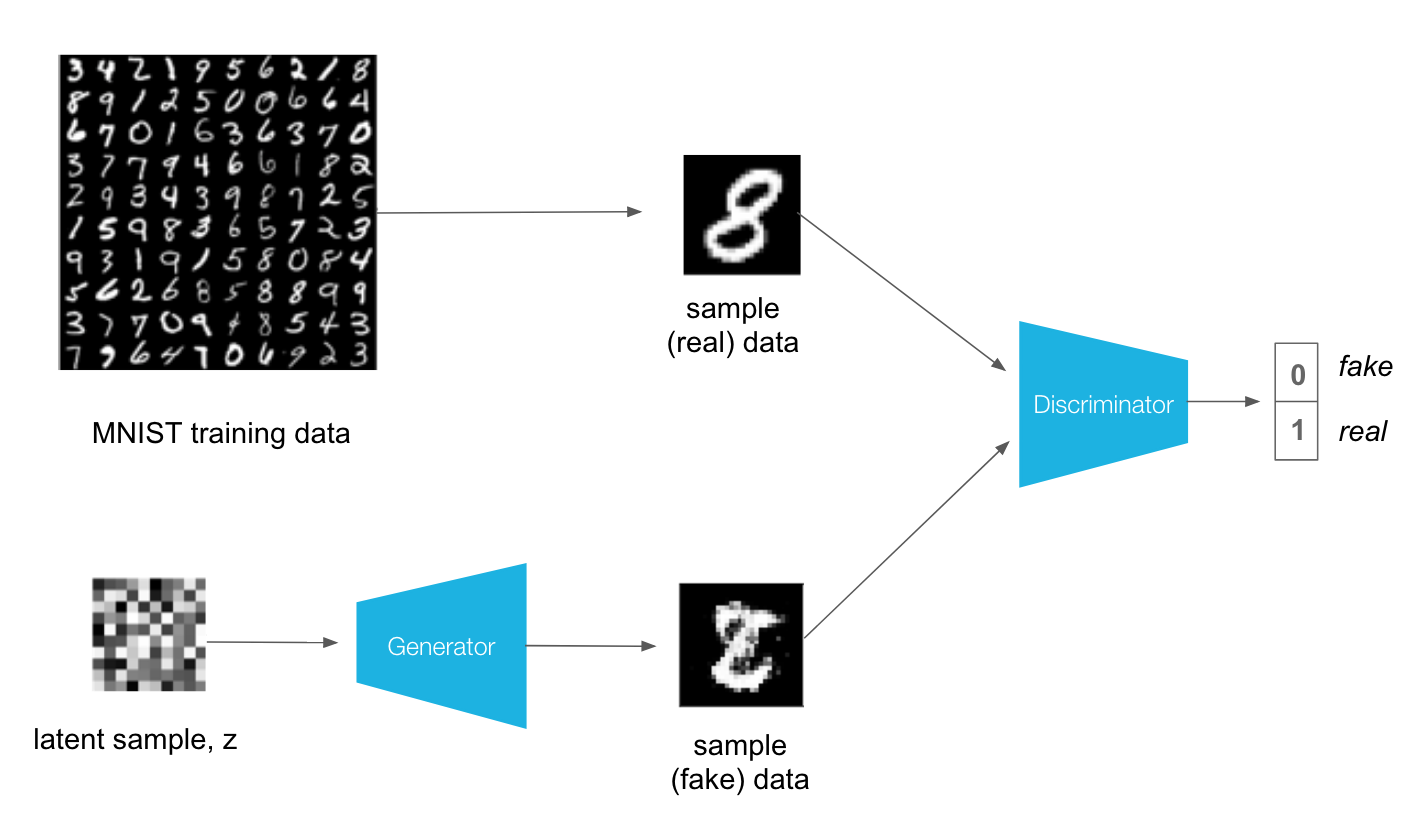
GAN model由两部分构成,Generator和Discriminator。 Generator的输入是一个random的tensor,它通过training不断校正自己的输出,直到输出的图片接近于真实的图片。Discriminattor是一个image classifier,用来判断输入的图片是真的还是假的。整个GAN model训练的过程可以理解为一个competition,Generator不断训练自己生成接近真实的图片,Discriminator不断训练自己检测假的图片,直到迫使Generator生成出接近真实的图片。这个过程很类似于博弈论中寻找的纳什均衡点。
The MNIST GAN Model
我们还是先从最简单的MNIST dataset开始。我们训练一个GAN model用来生成数字,整个Architecture如下所示
由于MNIST数据量比较小,我们可以使用FC layer作为hidden layer即可。对于GAN model有几个比较特殊的地方
- 我们需要使用
Leaky ReLU作为activation函数。因为Leaky ReLU可以确保gradient可以flow through整个network。这个对于GAN model很重要,因为Generator在train的时候需要Discriminator的gradient信息。 - Generator的输出通常是用
tanh,将tensor限制在(-1, 1),这是由于Generator的output通常是Discriminator的input。对于Discriminator,它输入的MNIST图片也需要映射到(-1, 1)
综上,Generator和Discriminator的model结构并不复杂,定义如下
class Discriminator(nn.Module):
def __init__(self, input_size, hidden_dim, output_size):
super(Discriminator, self).__init__()
# define hidden linear layers
self.fc1 = nn.Linear(input_size, hidden_dim*4)
self.fc2 = nn.Linear(hidden_dim*4, hidden_dim*2)
self.fc3 = nn.Linear(hidden_dim*2, hidden_dim)
# final fully-connected layer
self.fc4 = nn.Linear(hidden_dim, output_size)
# dropout layer
self.dropout = nn.Dropout(0.3)
def forward(self, x):
# flatten image
x = x.view(-1, 28*28)
# all hidden layers
x = F.leaky_relu(self.fc1(x), 0.2) # (input, negative_slope=0.2)
x = self.dropout(x)
x = F.leaky_relu(self.fc2(x), 0.2)
x = self.dropout(x)
x = F.leaky_relu(self.fc3(x), 0.2)
x = self.dropout(x)
# final layer
out = self.fc4(x)
return out
class Generator(nn.Module):
def __init__(self, input_size, hidden_dim, output_size):
super(Generator, self).__init__()
# define hidden linear layers
self.fc1 = nn.Linear(input_size, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, hidden_dim*2)
self.fc3 = nn.Linear(hidden_dim*2, hidden_dim*4)
# final fully-connected layer
# restore the size to 28*28
self.fc4 = nn.Linear(hidden_dim*4, output_size)
# dropout layer
self.dropout = nn.Dropout(0.3)
def forward(self, x):
# all hidden layers
x = F.leaky_relu(self.fc1(x), 0.2) # (input, negative_slope=0.2)
x = self.dropout(x)
x = F.leaky_relu(self.fc2(x), 0.2)
x = self.dropout(x)
x = F.leaky_relu(self.fc3(x), 0.2)
x = self.dropout(x)
# final layer with tanh applied
out = F.tanh(self.fc4(x))
return out
Discriminator和Generator的HyperParameter定义如下
Discriminator(
(fc1): Linear(in_features=784, out_features=128, bias=True)
(fc2): Linear(in_features=128, out_features=64, bias=True)
(fc3): Linear(in_features=64, out_features=32, bias=True)
(fc4): Linear(in_features=32, out_features=1, bias=True)
(dropout): Dropout(p=0.3, inplace=False)
)
Generator(
(fc1): Linear(in_features=100, out_features=32, bias=True)
(fc2): Linear(in_features=32, out_features=64, bias=True)
(fc3): Linear(in_features=64, out_features=128, bias=True)
(fc4): Linear(in_features=128, out_features=784, bias=True)
(dropout): Dropout(p=0.3, inplace=False)
)
Train Discriminator
在Training时,我们要同时计算来自Generator和Discriminator的两个loss。其中Discriminator比较直观,因为它的输出是0或者1,代表出图片是真还是假,因此它是一个binary classifier。其loss函数可以用binary cross-entropy loss。 这里有一个比较tricky的地方,我们需要用BCEWithLogitsLoss而不是sigmoid + BCELoss
prob = F.sigmoid(logits) #logits是最后一个FC的输出
loss != nn.BCELoss(prob, labels)
loss = nn.BCEWithLogitsLoss(prob, labels*0.9)
BCEWithLogitsLoss combines a sigmoid activation function and and binary cross entropy loss in one function.
对于Discriminator来说,它有两个inputs,一个是real image,一个是fake image。因此它也有两个loss函数,real_loss和fake_loss。对于real image,groud truth label是1,即D(real_image)=1,这里为了让model更generalize,我们另y=0.9。对于输入是fake image,我们希望D(fake_image)=0,因此y是0。总的loss为real_loss + fake_loss。定义loss函数如下
def real_loss(D_out, smooth=False):
batch_size = D_out.size(0)
# label smoothing
if smooth:
# smooth, real labels = 0.9
labels = torch.ones(batch_size)*0.9
else:
labels = torch.ones(batch_size) # real labels = 1
# numerically stable loss
criterion = nn.BCEWithLogitsLoss()
# calculate loss
loss = criterion(D_out.squeeze(), labels)
return loss
def fake_loss(D_out):
batch_size = D_out.size(0)
labels = torch.zeros(batch_size) # fake labels = 0
criterion = nn.BCEWithLogitsLoss()
# calculate loss
loss = criterion(D_out.squeeze(), labels)
return loss
训练Discriminator,可以follow下面步骤
d_optimizer.zero_grad()
# 1. Compute the discriminator loss on real, training images
D_real = D(real_images)
d_real_loss = real_loss(D_real, smooth=True)
# 2. Generate fake images
z = np.random.uniform(-1, 1, size=(batch_size, z_size))
z = torch.from_numpy(z).float()
fake_images = G(z)
# 3. Compute the discriminator losses on fake images
D_fake = D(fake_images)
d_fake_loss = fake_loss(D_fake)
#4. add up loss and perform backprop
d_loss = d_real_loss + d_fake_loss
#5. back prop + optimization
d_loss.backward()
d_optimizer.step()
Train Generator
对于Generator来说,它的输出y是一个fake image,我们将它作为Discriminator的输入。由于Generator的目标是D(fake_image)=1,我们需要让Discriminator认为来自Generator的输入是一个real image,因此我们需要用real_loss
训练Generator,可以follow下面的步骤
g_optimizer.zero_grad()
# 1. Generate fake images
z = np.random.uniform(-1, 1, size=(batch_size, z_size))
z = torch.from_numpy(z).float()
fake_images = G(z)
# 2. Compute the discriminator losses on fake images
# using flipped labels!
D_fake = D(fake_images)
g_loss = real_loss(D_fake) # use real loss to flip labels
# 3. perform backprop
g_loss.backward()
g_optimizer.step()
Training Results
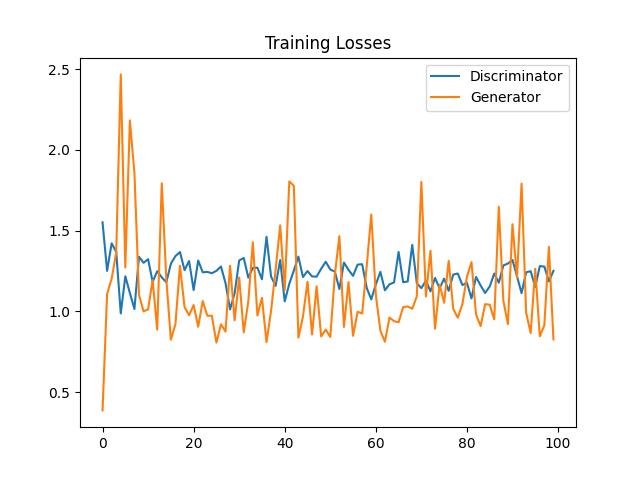
我们选取optimizer为Adam, learning rate为0.002, num_epochs = 100 两个model的training loss的变化如下图
我们也可以观察在训练中Generator输出的变化情况。我们可以在每个epoch之后输出一张Generator的图片
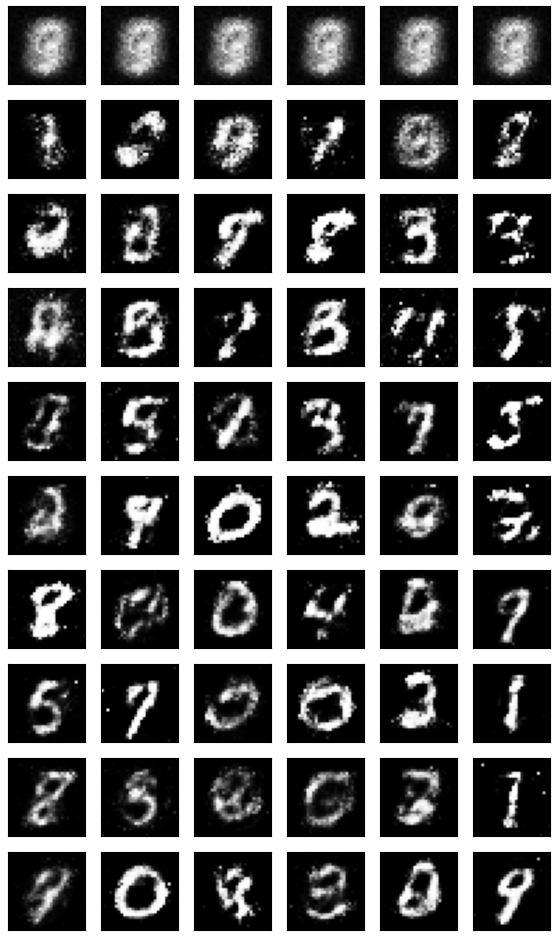
可见,对于任意一个random tensor,Generator可以生成一个类似手写的数字。当然MNIST是个非常简单的情况,对于复杂一点的图片,我们需要用Convolution layer来代替FC layer。
Deep Convolutional GAN
DC GAN和上面的MNIST model工作原理基本相同,不同的是DC GAN使用conv layer作为hidden layer。Paper中还列出了architecture设计的几个关键点
- Replace any pooling layers with strided convolutions (discriminator) and fractional-strided convolutions (generator).
- Use batchnorm in both the generator and the discriminator.
- Remove fully connected hidden layers for deeper architectures.
- Use ReLU activation in generator for all layers except for the output, which uses Tanh.
- Use LeakyReLU activation in the discriminator for all layers.
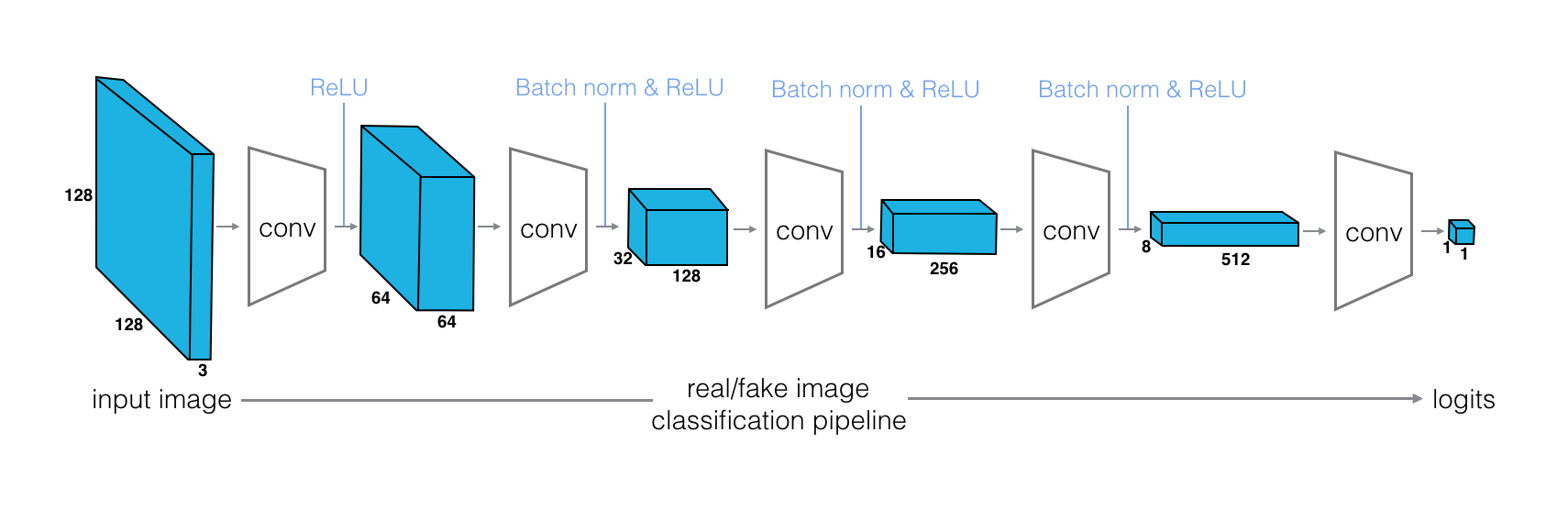
Discriminator
Discriminator的结构和上面的MNIST model类似,它由若干个conv layer构成。和普通的classification model不同的是,它用stride=2的conv来取代pooling。
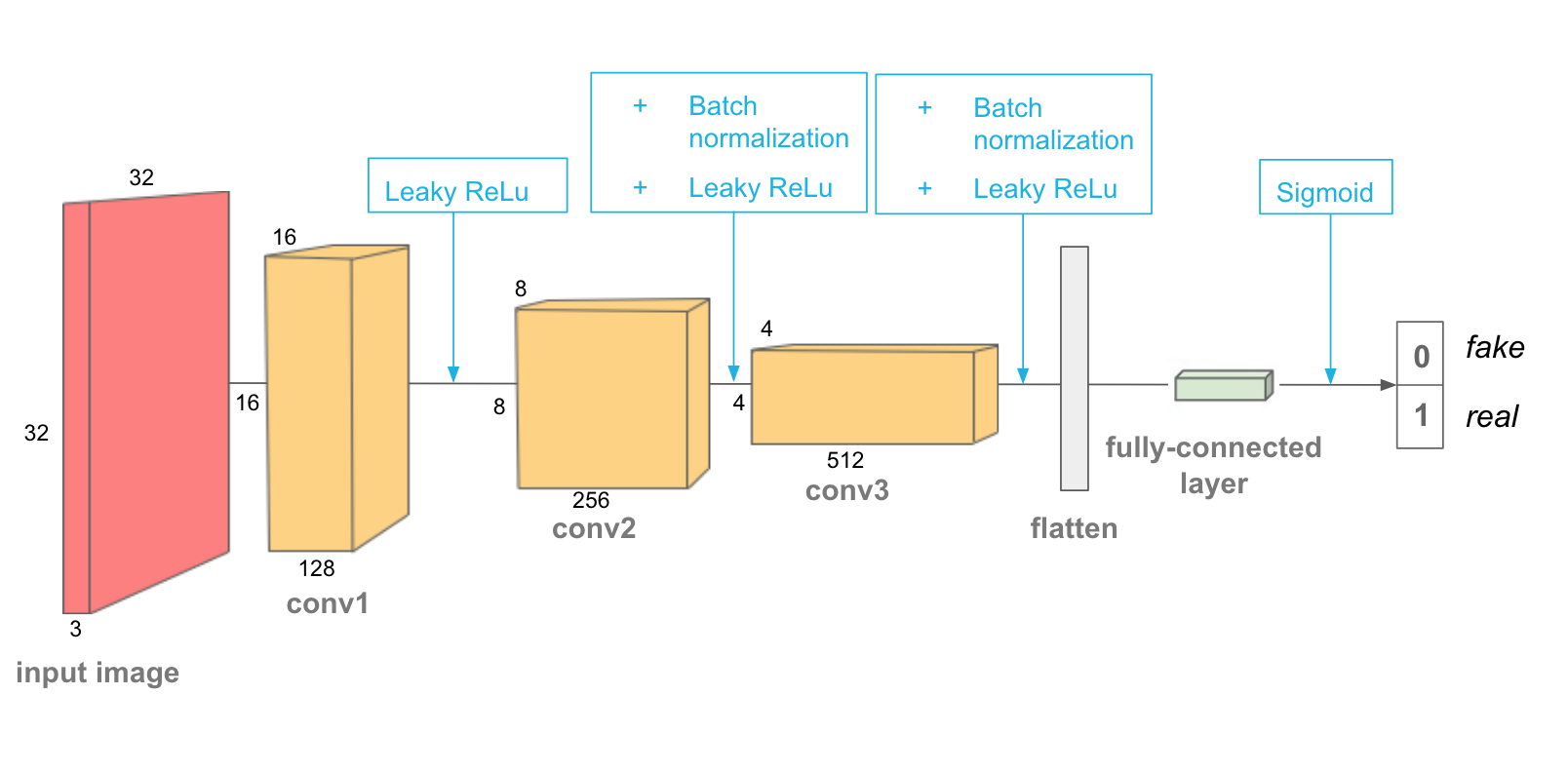
需要注意的是,除了第一个conv layer外,后面的每个conv layer都需要追加BatchNorm操作来帮助training更好的converge。conv layer的depth可以从32开始,后面逐层double (64, 128, etc)。
# helper conv function
def conv(in_channels, out_channels, kernel_size, stride=2, padding=1, batch_norm=True):
"""Creates a convolutional layer, with optional batch normalization.
"""
layers = []
conv_layer = nn.Conv2d(in_channels, out_channels,
kernel_size, stride, padding, bias=False)
# append conv layer
layers.append(conv_layer)
if batch_norm:
# append batchnorm layer
layers.append(nn.BatchNorm2d(out_channels))
# using Sequential container
return nn.Sequential(*layers)
class Discriminator(nn.Module):
def __init__(self, conv_dim=32):
super(Discriminator, self).__init__()
self.conv_dim = conv_dim
self.conv1 = conv(3, conv_dim, 4, batch_norm=False)
self.conv2 = conv(conv_dim, conv_dim*2, 4)
self.conv3 = conv(conv_dim*2, conv_dim*4, 4)
self.fc = (conv_dim*4*4*4, 1)
def forward(self, x):
# complete forward function
x = F.leaky_relu(self.conv1(x), 0.2)
x = F.leaky_relu(self.conv2(x), 0.2)
x = F.leaky_relu(self.conv3(x), 0.2)
x = x.view(-1, self.conv_dim*4 * 4 * 4)
x = self.fc(x)
return x
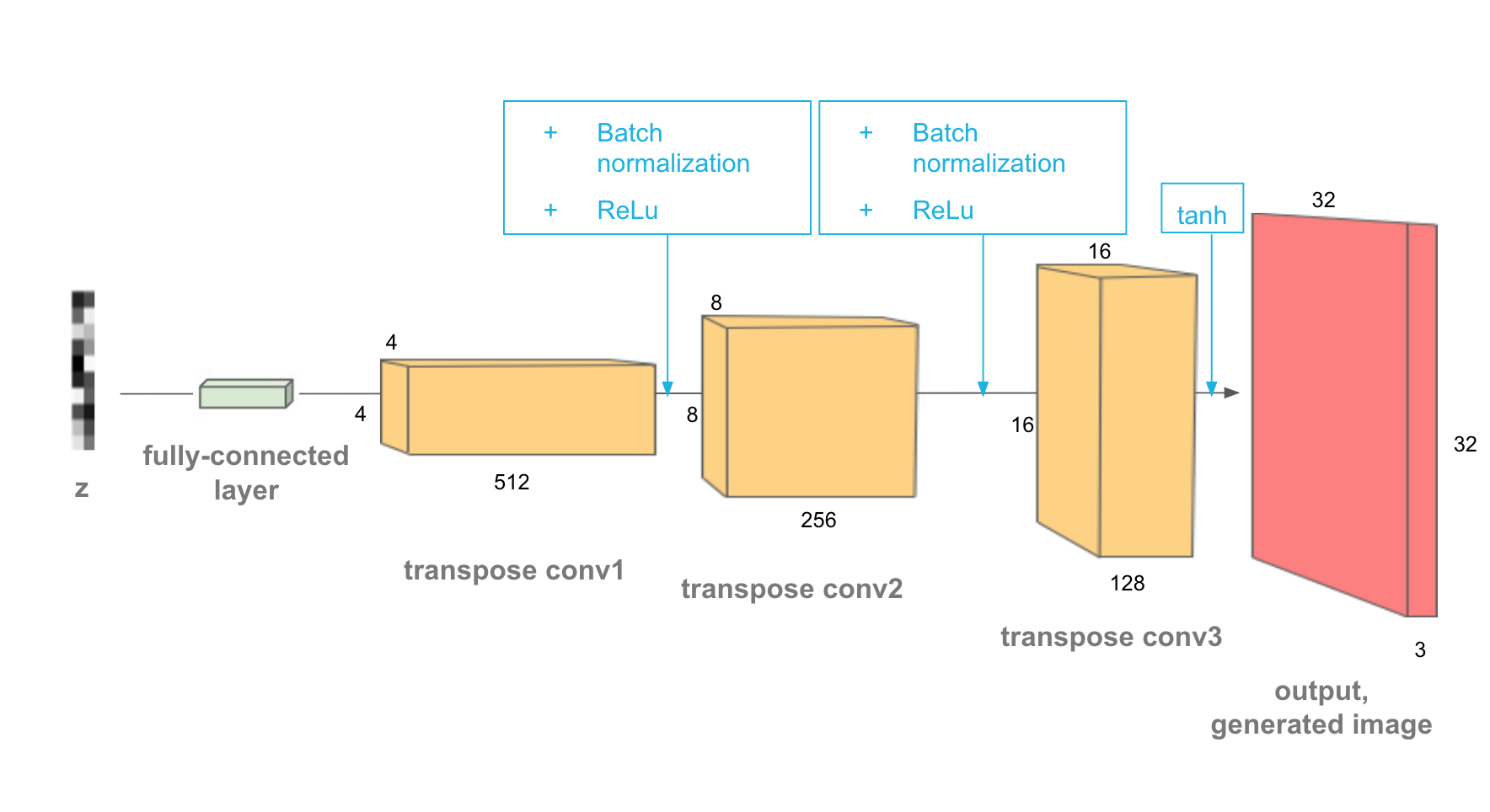
Generator
Generator的input也是一个noise vector,它使用transpose conv(stride=2)来增加feature map的spatial size。同样的,我们需要使用对conv layer追加BatchNorm
# helper deconv function
def deconv(in_channels, out_channels, kernel_size, stride=2, padding=1, batch_norm=True):
"""Creates a transposed-convolutional layer, with optional batch normalization.
"""
layers = []
transposed_conv_layer = nn.ConvTranspose2d(in_channels, out_channels,
kernel_size, stride, padding, bias=False)
# append conv layer
layers.append(transposed_conv_layer)
if batch_norm:
# append batchnorm layer
layers.append(nn.BatchNorm2d(out_channels))
# using Sequential container
return nn.Sequential(*layers)
class Generator(nn.Module):
def __init__(self, z_size, conv_dim=32):
super(Generator, self).__init__()
self.conv_dim = conv_dim
# complete init function
self.fc = nn.Linear(z_size, conv_dim*4*4*4)
self.deconv1 = deconv(conv_dim*4, conv_dim*2, 4)
self.deconv2 = deconv(conv_dim*2, conv_dim, 4)
self.deconv3 = deconv(conv_dim, 3, 4, batch_norm = False)
def forward(self, x):
x = self.fc(x)
x = x.view(-1, self.conv_dim*4, 4, 4) # (1, 128, 4, 4)
x = F.relu(self.deconv1(x), 0.2) # (1, 64, 8, 8)
x = F.relu(self.deconv2(x), 0.2) # (1, 32, 16, 16)
x = self.deconv3(x) #(32, 32)
x = F.tanh(x)
return x
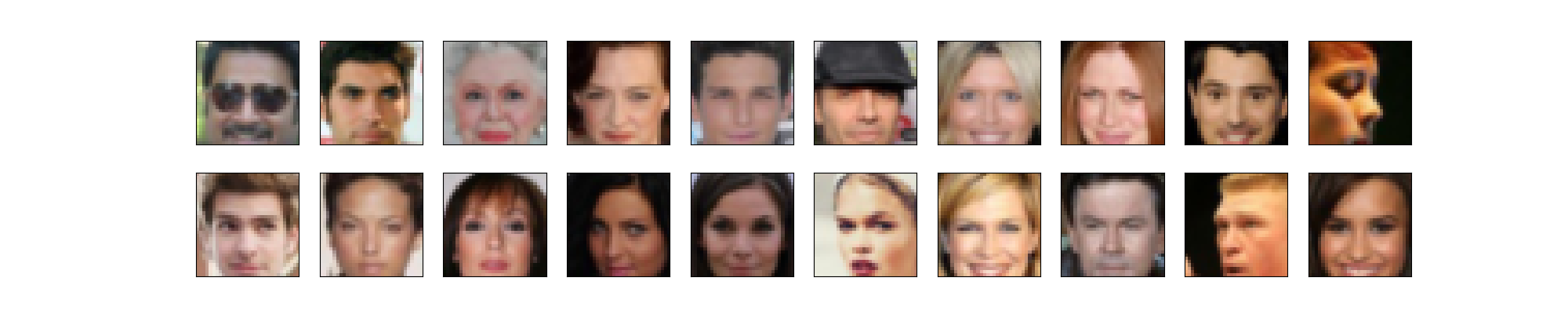
Generate Faces
我们可以用上面的model来尝试生成人脸,CelebFaces提供了大量的图片,为了节省训练时间,我们将图片resize成(32,32),Sample如下图所示
生成图片如下图所示
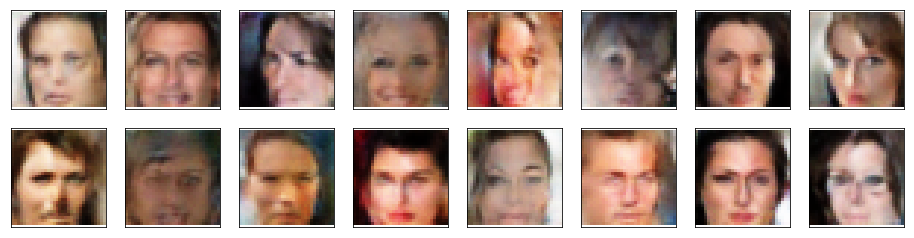
不论是MNIST GAN还是DC GAN,他们model的结构都不复杂,而且他们的输入都是一个noise vector。实际应用中,这种model并没有特别大用处,想要生成高质量的fake image,仅仅使用random input是不够的,接下来我们来看一下Cycle GAN。
Cycle GAN
在了解Cycle GAN之前,我们先要了解下Pix2Pix GAN。Pix2Pix GAN解决的问题是image mapping,即Generator将一张图片x映射成另一张图片y。这就需要我们的training data是pair images。其中,$x_i$是Generator的输入,$y_i$是ground true。我们的目标是训练Generator,使$G(x_i) = y_i$。
Paper使用Unet作为Generator的architecture。Input先经过一个encoder变成小的feature maps,再经过decoder将尺寸复原。

decoder输出的图片再通过Discriminator进行classification。Discriminator的结构和前一篇文章中的DC GAN类似
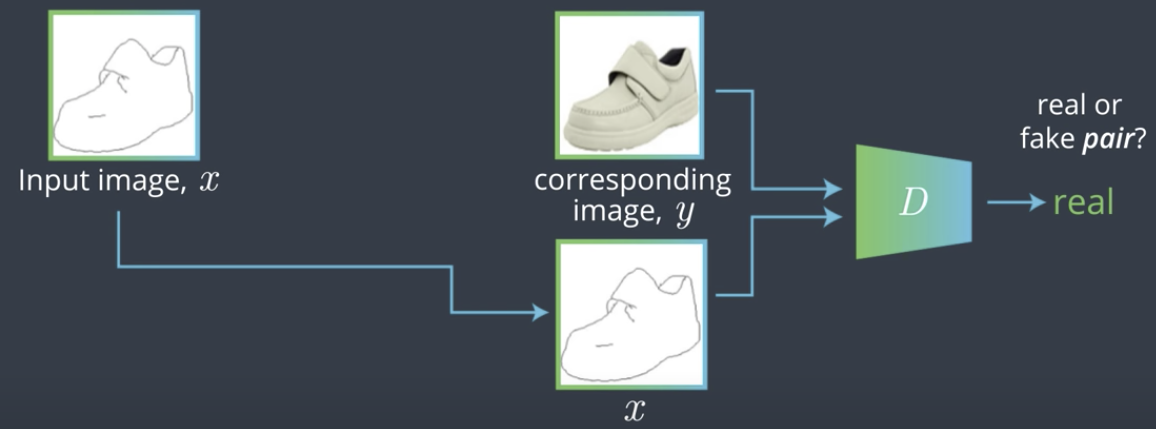
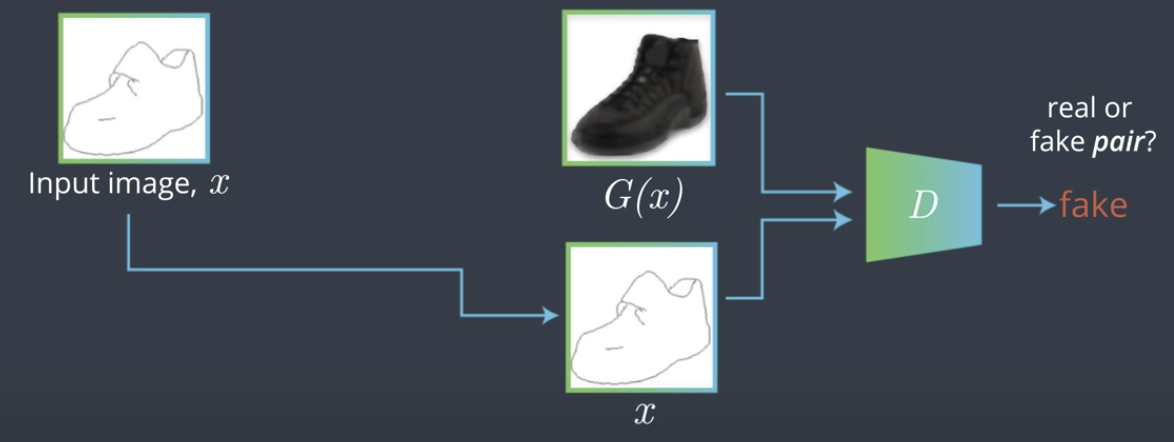
上面Generator结构有一个问题是,Discriminator如何判断Generator的输出是否是fake。举例来说,理想情况下,$G(x_1)=y_1$,但是如果出现$G(x_1)=y_2$的情况,由于$y_2$是real image,Discriminator也会将其判定为true。因此,Discriminator的输入应该是一对pair,它的outputs是这对pair是否是match。如下图所示
实际应用中,这种一对一的pair data是很难得到的。比较容易得到的是两组image set - $X$和$Y$,比如一组马的图片和一组斑马的图片。此时我们需要找到一个映射使 $G(X) = Y$,即对于$X$中的每个image,都有$G(x) = y$。此时不是一对一的映射,而是多对多的映射,是unsupervised learning,如下图所示
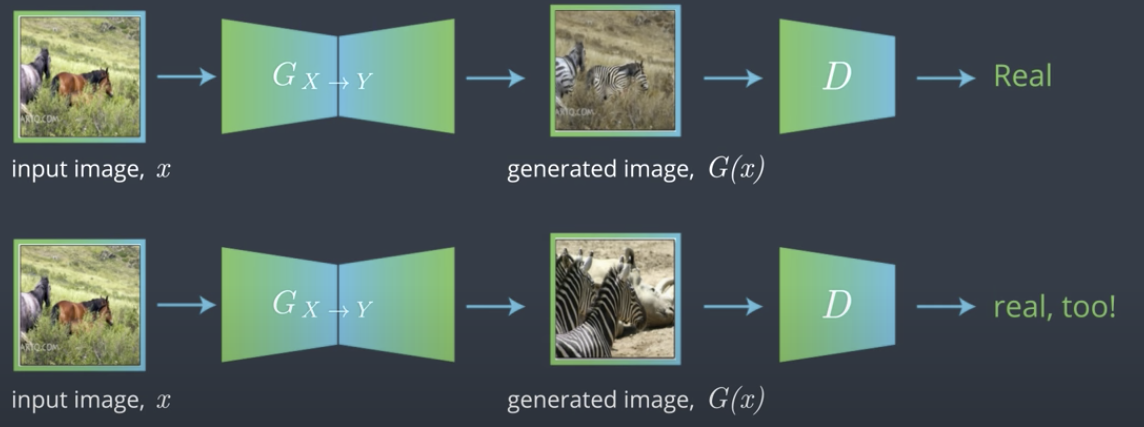
如果仔细思考,这里会有一个问题,既然是多对多,就会有多个$x$映射到同一个$y$的可能,为了避免这种情况,我们还要建立一个反向约束,即$G(Y) = X$,此时有
\[G_{YtoX}(G_{XtoY(x)}) \approx x\]既然需要reverse mapping,我们就需要两组GAN,一组完成$G(X)=Y$,另一组完成$G(Y)=X$。因此我们就有两组Adversarial Loss $L_X$和$L_Y$。此外,为了满足上面的式子,我们还需要引入一个Cycle Consistency Loss来确保生成出的图片被revert回去后可以和原图近似。
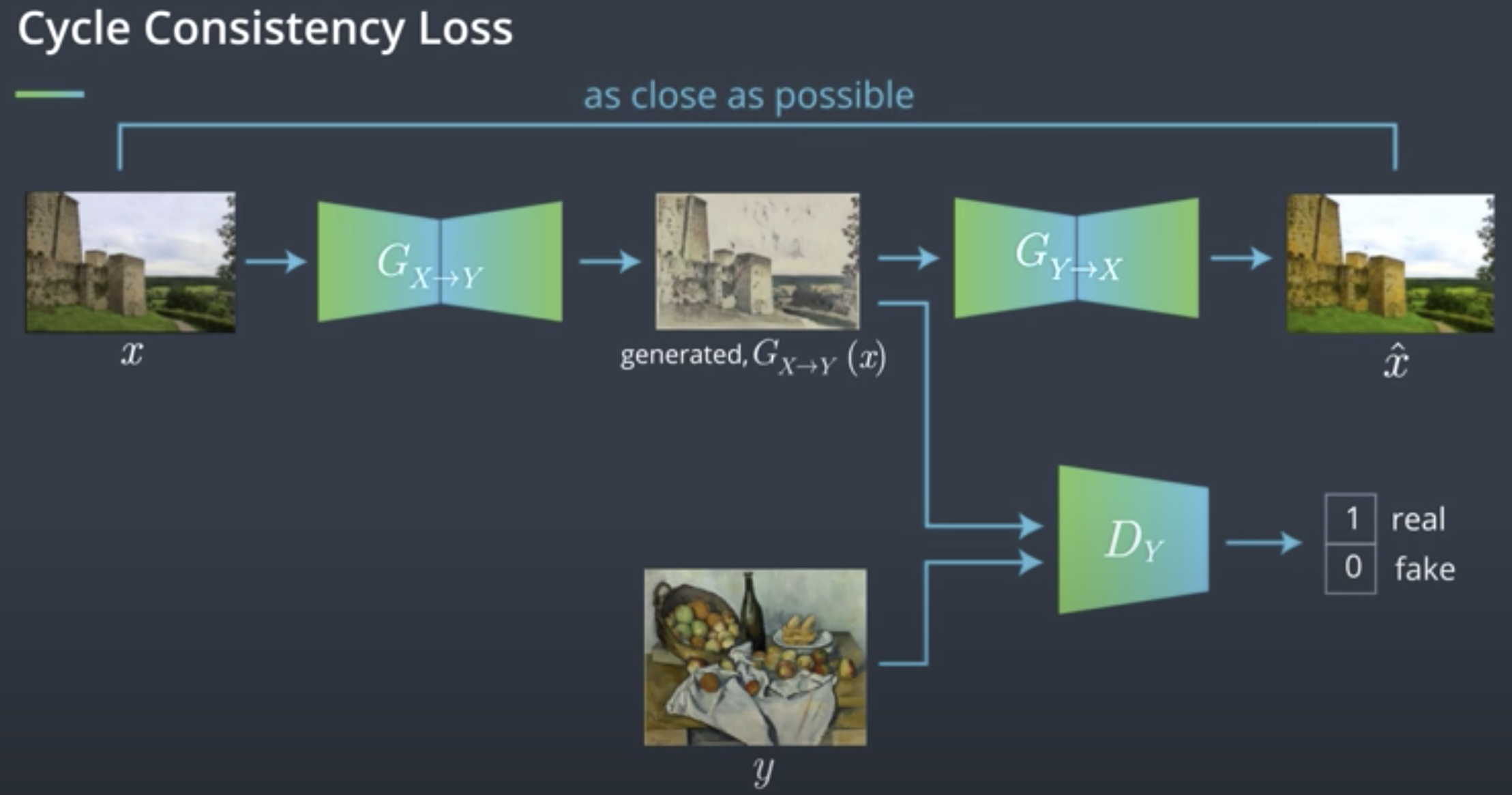
Cycle Consistency Loss同样也有两组,分别为forward consistency loss 和 backward consistency loss,分别对应$x$和$y$。
\[total loss = L_Y + L_X + \lambda L_{cyc}\]Discriminator
Cycle GAN需要两个Discriminator和Generator。Discriminator的结构前文DC GAN相似,区别在于Input不需要经过Fully Connected Layer。我们另input的size为[1, 3, 128, 128]
class Discriminator(nn.Module):
def __init__(self, conv_dim=64):
super(Discriminator, self).__init__()
# Should accept an RGB image as input and output a single value
self.conv_dim = conv_dim
self.conv1 = conv(3, conv_dim, 4, batch_norm=False) #(64, 64, 64)
self.conv2 = conv(conv_dim, conv_dim * 2, 4) # (32, 32, 128)
self.conv3 = conv(conv_dim * 2, conv_dim * 4, 4) # (16, 16, 256)
self.conv4 = conv(conv_dim * 4, conv_dim * 8, 4) # (8, 8, 512)
self.conv5 = conv(conv_dim * 8, 1, 4, stride=1, batch_norm=False)
def forward(self, x):
# define feedforward behavior
x = F.relu(self.conv1(x))
x = F.relu(self.conv2(x))
x = F.relu(self.conv3(x))
x = F.relu(self.conv4(x))
x = self.conv5(x)
return x
Generator
Generator的结构有一点特殊,我们需要在encoder和decoder之间引入skip connection,即Residual Block。其目的是解决梯度消失的问题,一个Residual block定义如下
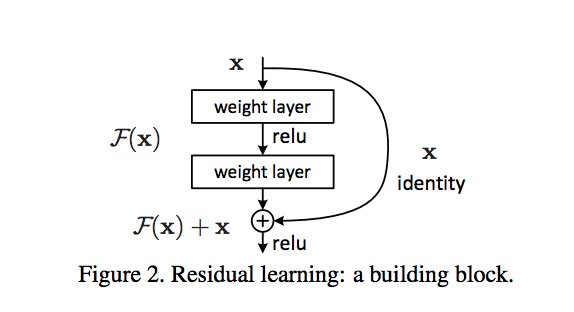
通常一个block有两个conv组成,每个conv使用3x3的kernel,且input和output的channel相同,因此当x通过两个conv的layer之后,得到的y的shape不会发生任何变化,因此可以和x进行elementwise相加。
class ResidualBlock(nn.Module):
"""Defines a residual block.
This adds an input x to a convolutional layer (applied to x) with the same size input and output.
These blocks allow a model to learn an effective transformation from one domain to another.
"""
def __init__(self, conv_dim):
super(ResidualBlock, self).__init__()
self.conv1 = conv(conv_dim, conv_dim, kernel_size=3, stride=1, padding=1, batch_norm=True)
self.conv2 = conv(conv_dim, conv_dim, kernel_size=3, stride=1, padding=1, batch_norm=True)
def forward(self, x):
y = F.relu(self.conv1(x))
y = x + self.conv2(y)
return y
接下来我们根据前面提到的Generator的结构创建model,paper中使用6个residual block,input size同样为[1,3,128,128]
class CycleGenerator(nn.Module):
def __init__(self, conv_dim=64, n_res_blocks=6):
super(CycleGenerator, self).__init__()
# 1. Define the encoder part of the generator
self.conv1 = conv(3, conv_dim, 4)
self.conv2 = conv(conv_dim, conv_dim*2, 4)
self.conv3 = conv(conv_dim*2, conv_dim*4, 4)
# 2. Define the resnet part of the generator
res = []
for _ in range(n_res_blocks):
res.append(ResidualBlock(conv_dim * 4))
self.res_blocks = nn.Sequential(*res)
# 3. Define the decoder part of the generator
self.deconv1 = deconv(conv_dim*4, conv_dim*2, 4)
self.deconv2 = deconv(conv_dim*2, conv_dim, 4)
self.deconv3 = deconv(conv_dim, 3, 4, batch_norm=False)
def forward(self, x):
x = F.relu(self.conv1(x))
x = F.relu(self.conv2(x))
x = F.relu(self.conv3(x))
x = self.res_blocks(x)
x = F.relu(self.deconv1(x))
x = F.relu(self.deconv2(x))
x = F.tanh(self.deconv3(x))
return x
Discriminator and Generator Losses
前面提到,Cycle GAN的loss由两部分组成,一部分是Adversarial loss,前面文章已经讨论过,但是Cycle GAN的Discriminator不能使用Cross Entropy loss,原因paper中提到会有梯度消失的问题,因此,这里需要使用mean square loss. Cycle GAN loss的另一分部分是Cycle Consistency loss,这个loss比较简单,只是比较生成的图片和原图片每个像素点的差异即可。各种loss计算如下
def real_mse_loss(D_out):
# how close is the produced output from being "real"?
return torch.mean((D_out-1)**2)
def fake_mse_loss(D_out):
# how close is the produced output from being "false"?
return torch.mean(D_out**2)
def cycle_consistency_loss(real_im, reconstructed_im, lambda_weight):
# calculate reconstruction loss
# as absolute value difference between the real and reconstructed images
reconstr_loss = torch.mean(torch.abs(real_im - reconstructed_im))
# return weighted loss
return lambda_weight*reconstr_loss
训练Discriminator
训练Discriminator的步骤和前文的DC GAN基本类似,不同的是Cycle GAN要train两个Discriminator用来判断X和Y。可以follow下面步骤
## First: D_X, real and fake loss components ##
# Train with real images
d_x_optimizer.zero_grad()
# 1. Compute the discriminator losses on real images
out_x = D_X(images_X)
D_X_real_loss = real_mse_loss(out_x)
# Train with fake images
# 2. Generate fake images that look like domain X based on real images in domain Y
fake_X = G_YtoX(images_Y)
# 3. Compute the fake loss for D_X
out_x = D_X(fake_X)
D_X_fake_loss = fake_mse_loss(out_x)
# 4. Compute the total loss and perform backprop
d_x_loss = D_X_real_loss + D_X_fake_loss
d_x_loss.backward()
d_x_optimizer.step()
## Second: D_Y, real and fake loss components ##
# Train with real images
d_y_optimizer.zero_grad()
# 1. Compute the discriminator losses on real images
out_y = D_Y(images_Y)
D_Y_real_loss = real_mse_loss(out_y)
# Train with fake images
# 2. Generate fake images that look like domain Y based on real images in domain X
fake_Y = G_XtoY(images_X)
# 3. Compute the fake loss for D_Y
out_y = D_Y(fake_Y)
D_Y_fake_loss = fake_mse_loss(out_y)
# 4. Compute the total loss and perform backprop
d_y_loss = D_Y_real_loss + D_Y_fake_loss
d_y_loss.backward()
d_y_optimizer.step()